
Тип затвора камеры
Тип затвора камеры, используемой для получения изображений, может повлиять на результаты, полученные с помощью программного обеспечения для фотограмметрии. Например, изображения, снятые камерами со скользящим затвором, содержат вертикальное смещение, когда есть относительное движение между камерами и объектами во время получения изображения.
Глобальный и электронный затвор
Многие цифровые зеркальные фотоаппараты, бытовые камеры дронов и телефонные камеры используют скользящий затвор, чтобы снимать видео лучшего качества и уменьшить размытость движения. Основные игроки на рынке дронов, например, дроны DJI и камеры GoPro, имеют встроенный рольставни. Простота использования и разумная цена этих дронов и камер позволяют все большему количеству людей использовать их для картографических работ.
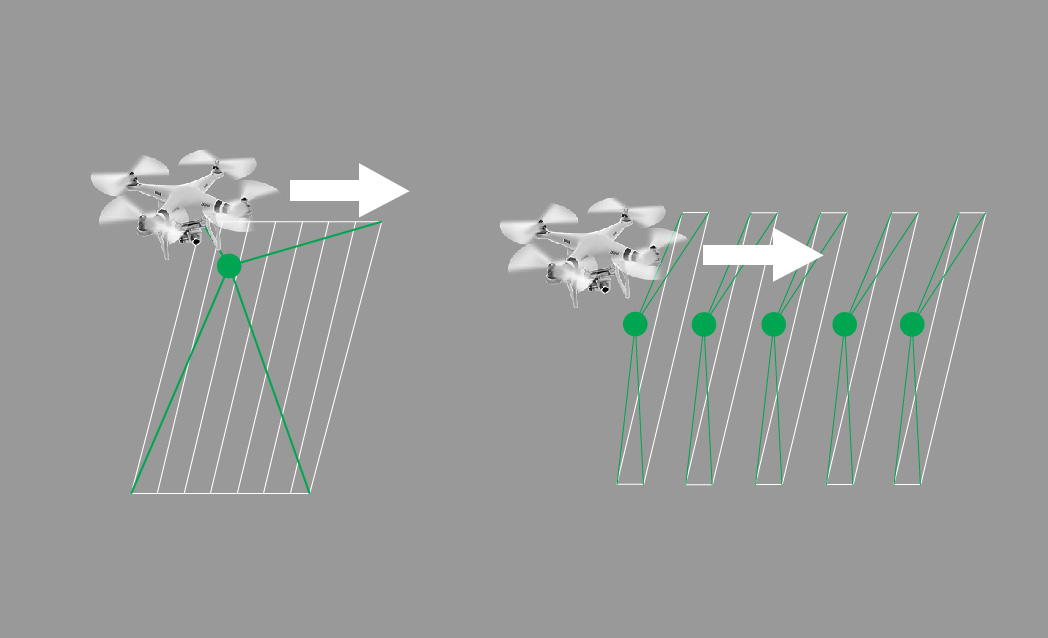
На этой анимации показано, как работают жалюзи двух основных типов. Камеры с глобальным затвором (слева) записывают весь кадр изображения почти в одно и то же время. Это обычно наблюдается в камерах с датчиком CCD. Камеры со скользящим затвором (справа) записывают каждое изображение построчно, сверху вниз. Этот тип затвора сейчас занимает большую часть рынка фотоаппаратов.
Эффект скользящего затвора
Эффект скользящего затвора возникает, когда отношение камера-объект уже изменилось во время построчного считывания того же изображения. При использовании этих искаженных изображений в программном обеспечении фотограмметрии смещение пикселей может вызвать проблемы с сопоставлением характеристик и, следовательно, неточные параметры камеры. Неточно рассчитанные параметры камеры, безусловно, приведут к низкому качеству картографирования. Здесь мы уделяем особое внимание потребительским камерам для дронов и экшн-камерам, поскольку в большинстве цифровых зеркальных камер реализован механический затвор, который позволяет пользователям устанавливать короткое время экспозиции. В этом случае эффект будет настолько незначительным, что им можно будет пренебречь.
Большинство программных процессов для фотограмметрии основаны на предположении, что при считывании одного изображения существует только одна позиция камеры. Модель коррекции скользящего затвора должно учитывать перемещение положения камеры.

No Comments