
Плавное выделение и оптимизация
- фильтруем ошибочные связующие точки через «Модель» - «Плавное выделение» выбирая параметр «Ошибка репроецирования» устанавливаем величину 0.5 единиц.

- В «Правка» - «Удалить выделенное», либо просто del (в случае если так же был выбраны опознак, то программа выдаст запрос удалить его или нет – жмём нет),
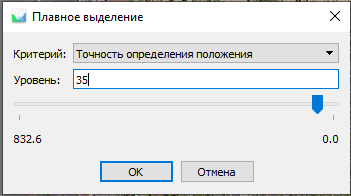
- Затем повторяем плавное выделение, но уже по параметру «Точность определения положения» устанавливаем величину 35 единиц и также удаляем выделенное.
- Расставляем маркера на всех снимках и выполняем оптимизацию выравнивания, при этом для оптимизации переводим в разряд опорного тот из контрольных маркеров (если у вас их несколько), на котором ошибка по высоте наиболее близка к средней ошибке по высоте всех контрольных маркеров (желательно с наибольшим или средним количеством проекций)
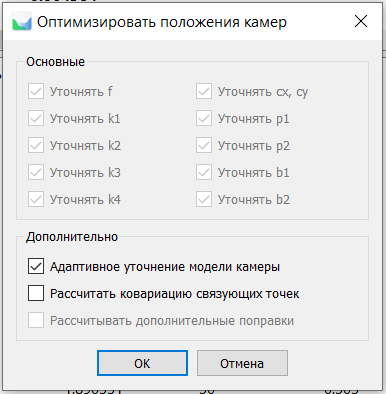
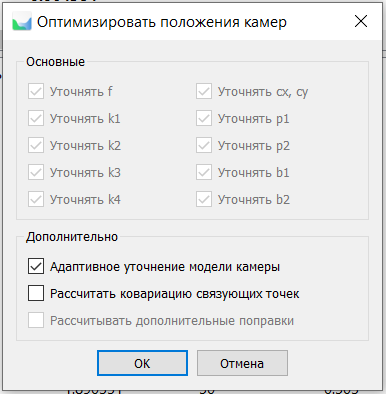
- Выполняем оптимизацию. Ставим галочку в «Адаптивное уточнение модели камеры»
Дальнейшая обработка (https://youtu.be/-0P-37Ia2yg) не отличается от стандартного алгоритма обработки данных с Phantom 4Pro (Teodrone).
Второй вариант оптимизации выравнивания камер по обработке данных с Temini.
При использовании этого метода распределение фактических величин ошибок на контрольных маркерах имеют более ровный характер в сравнении с методом оптимизации по одному опорному маркеру.
После расстановки маркеров на всех фотографиях необходимо выполнить уточнение величины фокусного расстояния камеры, для этого сохраняем проект, делаем копию рабочего блока, в зависимости от общего количества маркеров, выбираем в качестве опорных 1-3 маркера, выполняем оптимизацию выравнивания с адаптивным уточнением модели камеры. Сохраняем уточнённые данные калибровки камеры в файл формата *.ini для этого заходим в «Инструмент»-«Калибровка камеры»-«Уточнённая» - «Сохранить (жмём на изображение дискетки)». Открываем «Блокнотом» сохраненный файл *.ini и копируем уточнённую величину фокусного расстояния (значение напротив параметра «F»). Удаляем старую и делаем новую копию исходного блока. В сохранённой копии блока заходим в «Инструмент»-«Калибровка камеры»-«Начальная» и вставляем уточнённую величину фокусного расстояния в окошко напротив надписи «Фокусное расстояние (мм):». Фиксируем величину фокусного расстояния, для этого заходим в пункт «Выбрать» и ставим галочку напротив параметра «f». Производим оптимизацию выравнивания с адаптивным уточнением модели камеры вообще без использования маркеров в качестве опорных т.е. все маркера в статусе контрольных (без установленных галочек). Таким образом оптимизация выполняется только по точным центрам фотографирования и уточненному значению фокусного расстояния. В случае, когда в блоке используются фотографии из нескольких вылетов, после загрузки всех данных в проект, фотографии необходимо разбить на отдельные группы: «Инструмент»-«Калибровка камеры» - через клавишу "Shift" выделяем группу фотографий первого вылета- правая клавиша мыши - "создать группу", и так создаём группу для каждого вылета дрона. Уточняем фокусное расстояния камеры в каждой группе фотографий. (последовательность рассмотрена выше), при этом фиксировать в качестве опорного нужно тот маркер (или маркера, в случае их достаточного количества), который относится к соответствующей группе фотографий. При небольшом количестве маркеров в проекте, для уточнения фокусного расстояния в каждой группе используйте в качестве опорных все маркера.
No Comments