
Инструкция Mission planner fly.teofly.com для Litchi
При открытии Mission planner, открывается окно входа в личный кабинет. Если еще не регистрировались в сервисе Teofly.com, тогда воспользуйтесь ботом https://t.me/teoflybot - https://wiki.teofly.com/books/teoflycom/page/telegram-bot-at-teoflybot
Главный экран

 приблизить\отдалить карту; показать на экране все границы\маршруты; центрировать карту на своем местоположении.
приблизить\отдалить карту; показать на экране все границы\маршруты; центрировать карту на своем местоположении. - адресный поиск по населенным пунктом всего мира.
- адресный поиск по населенным пунктом всего мира.
 - включение виджета погоды
- включение виджета погоды
 - включение сетки для помощи при планировании.
- включение сетки для помощи при планировании.
 - TEO - название проекта; 0.0 km - протяженность полета; 0 min - расчетное время полета; 0WPs - Количество WayPoints (путевых точек). у DJI максимум 99шт. 0 imgs - расчетное количество фотографий.
- TEO - название проекта; 0.0 km - протяженность полета; 0 min - расчетное время полета; 0WPs - Количество WayPoints (путевых точек). у DJI максимум 99шт. 0 imgs - расчетное количество фотографий.
 - Широта и долгота местоположения курсора. при нажатии на них можно ввести местоположения нужной точки; Alt:150 - высота полета из настроек; H:42m - Высотная отметка рельефа в месте курсора.
- Широта и долгота местоположения курсора. при нажатии на них можно ввести местоположения нужной точки; Alt:150 - высота полета из настроек; H:42m - Высотная отметка рельефа в месте курсора.
 - ov: 55% - поперечное перекрытие из настроек; rs: 4.1 cm\px - расчетный размер пикселя на местности; int: 2.2s - интервал фотографирования из настроек; fr:224x150m - размер снимка на земле.
- ov: 55% - поперечное перекрытие из настроек; rs: 4.1 cm\px - расчетный размер пикселя на местности; int: 2.2s - интервал фотографирования из настроек; fr:224x150m - размер снимка на земле.
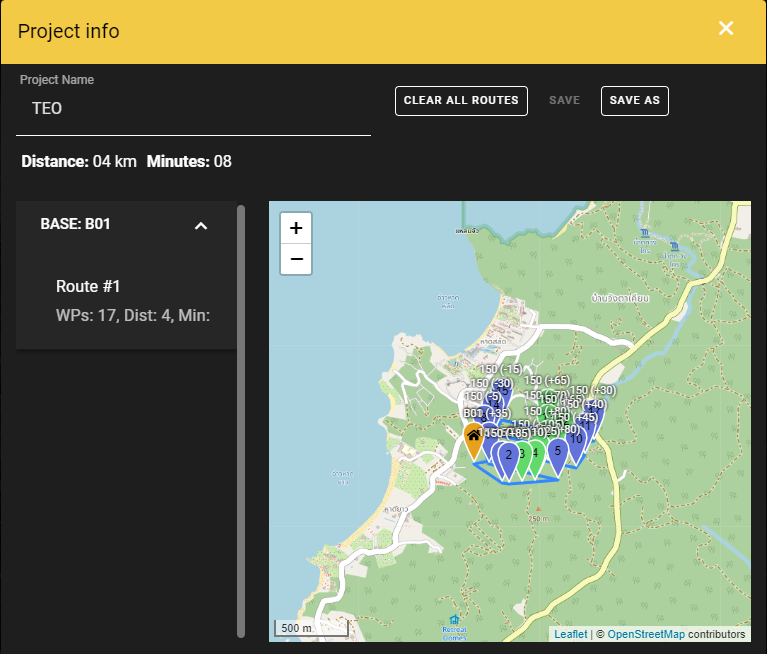
 - Project properties (настройки проекта)
- Project properties (настройки проекта)

В данной закладке можно задать имя проекта, просмотреть все маршруты, сохранить проект и очистить все маршруты (внимание, сохраните нежные маршруты перед удалением).
 - Open project (открыть проект).
- Open project (открыть проект).

Тут можно открыть ранее сохраненные проекты
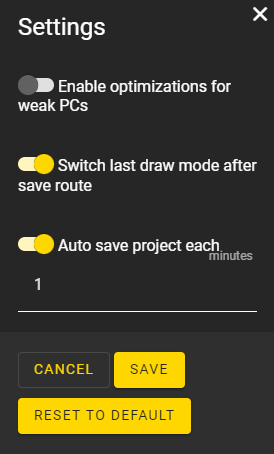
 - Applications settings (настройки работы планировщика)
- Applications settings (настройки работы планировщика)

1) оптимизация для слабых ПК
2) Начать рисовать новый маршрут тем же инструментом после окончания первого маршрута (после нажатия Enter)
3) Автосохранение через N минут.
 - Drone Settings (Настройки коптера)
- Drone Settings (Настройки коптера)

Первый блок настроек - это тип БПЛА.
Ph4 Pro - настройки для DJI Phantom 4 adv\pro\proV2
MOL`T Boat - планирование маршрута для лодки.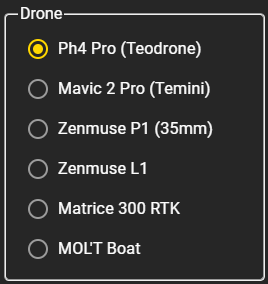
Второй блок - Select Preset. Выбрать предустановленные настройки для съемки различных типов местности
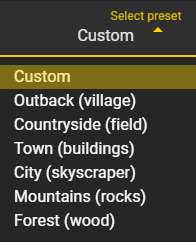
Outback (village) - деревня в глубинке
Counrtyside (field) - Поля (без густого леса, допустимы небольшие скопления деревьев или кустов)
Town (buildings) - съемка в городской застройке
City (Skyscraper) - съемка в городе с высокими сооружениям\небоскребами (внимание, проверь препятствие по маршруту обязательно)
Mountains (rocks) - yастройки для съемки в горах.
Forest (wood) - настройки для съемки леса.
Ниже идет блок настройки полета:
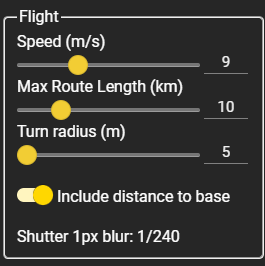
Speed (m\s) - Скорость полета коптера (метров в секунду). 10м\с=36км\ч Параметр участвует в расчете интервала фотографирования и величины смаза фотографии. Выше скорость - чаще фотографировать и тем больше смаз.
Max Route Lenght (km) - Максимальная протяженность маршрута. Изменять параметр нужно в зависимости от модели квадрокоптера, примерной силы ветра во время будущих полетов, "свежести" аккумуляторов.
Во время сильного ветра и на старых аккумуляторах квадрокоптер пролетит на 30% меньше чем на новых аккумуляторах без ветра. На этот параметр опирается инструмент "деления на маршруты".
Turn radius (m) - радиус закругления маршрута. чем больше радиус, тем меньше квадрокоптер снижает скорость для поворота. При радиусе 5-10м квадрокоптер пролетает поворот без остановки. с радиусом 1м - практически останавливается.
Include distance to base - учитывать расстояние от базы до первой точки маршрута и от последней точки маршрута до базы при расчете расстояния маршрута.
Shutter 1px blur: смаз фотографии на 1 пиксели. При текущих настройках это будет при скорости фотографирования 1\240 (это очень долгая выдержка, может применяться при съемке в пасмурную погоду или в вечерние сумерки). Это вспомогательный параметр для понимания пилота, что при такой долгой выдержке будет смаз 1пиксель.
Shots - настройки фотографирования (не путать с настройками камеры).
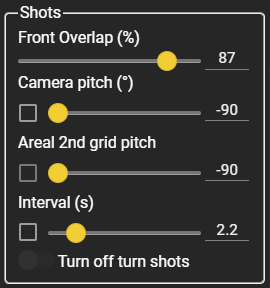
Front overlap (%) - продольное перекрытие (между фотографий внутри маршрута). От этого параметра зависит интервал фотографирования. И этот параметр зависит от высоты полета.
Camera pitch - Угол наклона камеры. изначально пилот сам контролирует и направляет камеру, но можно и запрагромировать. -90 - это камера направлена вниз. 0 - камера направлена вперед.
Areal 2nd grid pitch - наклон камера для съёмки в режиме 2GRID непосредственно для второго направления.
Interval (s) - Интервал фотографирования, который можно прописать в свойствах маршрута.
Эти параметры требуют активации, чтоб сервис начал их учитывать. До активации они носят лишь информационный характер.
Overlap - настройки влияющие на перекрытие
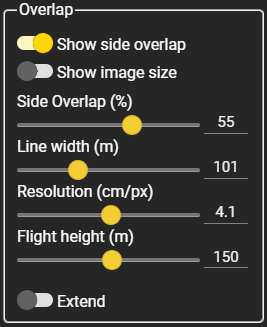
Все настройки взаимосвязаны.
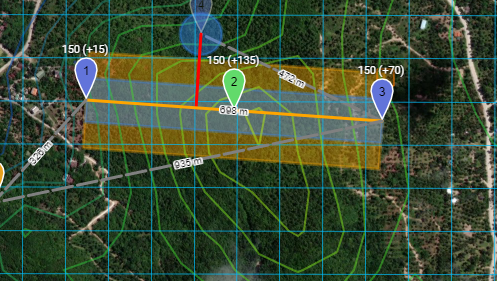
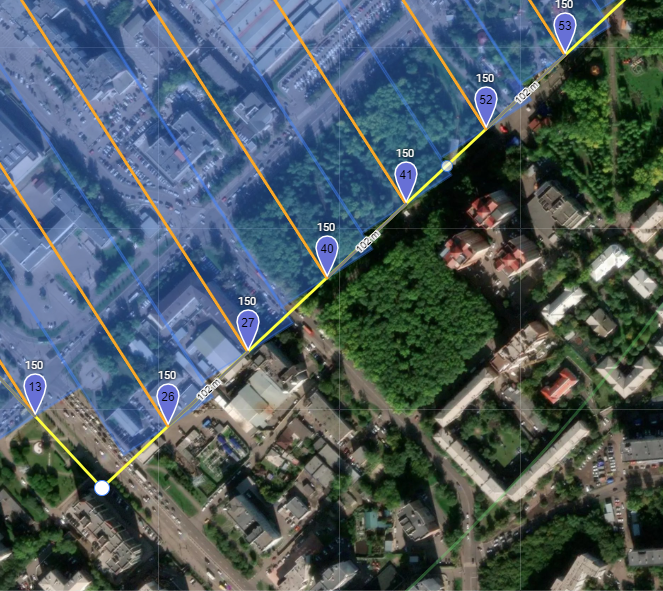
Show side overlap - показывать размер перекрытия. При построении маршрута будет подсвечена территория перекрытия, и для правильного построения маршрута будет требоваться стыковать эти подсвеченные области. (Голубая область)
Show image size - показывает размер фотографии (оранжевая область).
Side overlap (%) - поперечное перекрытие, между снимками на соседних линиях маршрута (галсах).
Line width (m) - расстояние между двух соседних линий маршрута (зависит от перекрытия и высоты полета)
Resolutio (cm\px) - размер пикселя на земле (сантиметров на пиксель) (зависит от высоты полета)
Flight height (m) - Высота полета (метров).
Extend - расширить границы параметров (для опытных пилотов).
 - SRTM - работа с рельефам местности.
- SRTM - работа с рельефам местности.

SRTM - от названия Shuttle Radar Topography Mission - международного исследовательского проекта.
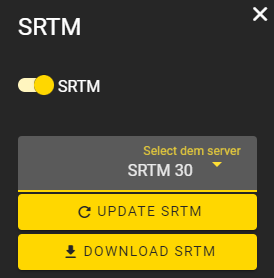
Первый блок настроек SRTM - выбор сервера: SRTM 30 или DEM 90 или пользовательский TIFF файл с картой высот (ограничение - 5 мб).
Update SRTM - обновить карту высот
Download SRTM - Загрузить карту высот на свой ПК.
Show isolines - Показать изолинии рельефа
Show Gradient - Раскрасить перепад высот градиентом
Show bound - показать границу скачанного рельефа
Dem points interval (m) -
Height Buffer -
Isoline Height - Шаг горизонталей
Opacity -
Gradient -
 - DRAWING MODE - Режим рисования.
- DRAWING MODE - Режим рисования.

Linear mode - для линейных маршрутов. Рисует две параллельных линии, относительно нарисованной оси. Автоматически перерисовывает маршрут так, чтоб начало было максимально близко к точке старта.
Single mode - рисование сложного маршрута вручную с инструментами помощи планирования.
Areal mode - Площадное планирование, для больший объектов, с разделением на отдельные маршруты оптимальной длины.
Waypoints mode - произвольный полет по точкам
Для всех режимов планирования крайне важно правильно выбрать точку старта, именно ту с которой вы будете взлетать, так как многие расчеты ведутся относительно нее. Так же указание одной точки для двух маршрутов будет означать, что точка старта будет одна и это будет видно в имени маршрута.
При включенном SRTM, все маршруты строятся с учетом рельефа.
При выключенном SRTM учет рельефа не производится и перед экспортом об этом будет напоминание.

Выбраd режим Linear, необходимо нарисовать ось съемки, а после завершения рисования оси трассы нажать Enter и установить точку старта. Маршрут будет автоматически перерисоватm относительно точки старта для оптимальной траектории полета и исключения лишних перелетов до начала и конца маршрута..
При необходимости 3 и более линий съемки, следует использовать режим Single и рисовать параллельные линии в нем вручную.


в режиме Single первым делом устанавливается точка взлета, и от нее уже идет планирование маршрута.
После указания точки взлета, вокруг нее появляется круг радиусом 2км. Это вспомогательный круг, рассчитан на ограничение области планирования с одной точка взлета. и при необходимости снимать бОльшую площадь, рекомендуем разбивать на несколько точек взлета.

Для удобства планирования можно подгрузить KML файл с границей съемки (в разделе слои).
После установки точки взлета указываем первую точку маршрута. Крайняя линия маршрута должна проходить либо непосредственно над границей съемки, либо выходить за ее пределы. Следует понимать, что к примеру, при съемке города, там где проходит крайняя линия маршрута - с внешней стороны контура съемки не будет 3D модели по стенам домов (либо других возвышенностей), так как эта сторона объектов не будет ни на одной фотографии. Если требуется полная и детальная модель всех объектов внутри контура, тогда по границе объекта должна проходить не первая, а вторая линия маршрута.

Зажав кнопку CTRL при рисовании маршрута, мы сообщаем системе, чтоб в этом месте будет выполняться фотографирование. В этот момент система подсвечивает область перекрытия голубой полупрозрачной областью.
Когда ведем курсор, рядом с ним можно увидеть красную\желтую\зеленую перпендикулярную линию - это индикатор перекрытия с предыдущим отрезком. Когда горит линия, то установив точку перекрытие будет оптимальным. Этот инструмент пригождается когда разворот не буквой "П", а в одной точке и под углом коптер полетит обратно.
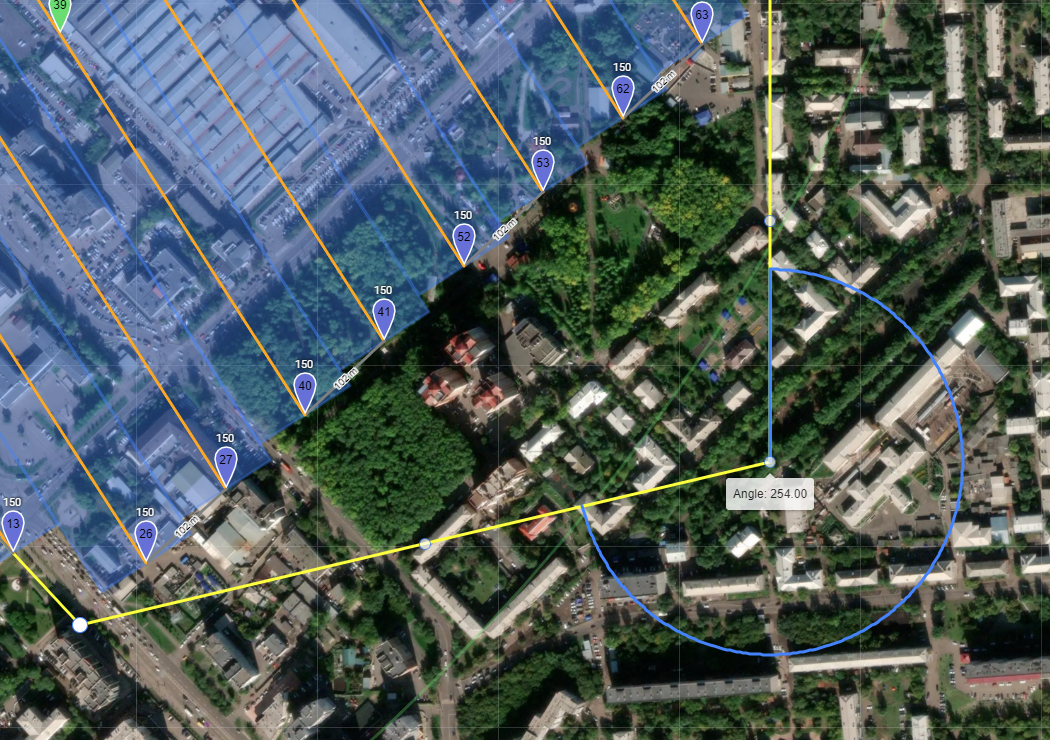
При рисовании параллельных линий, есть специальный инструмент помощник.
Нарисовав первую линию с зажатой кнопкой CTRL и дойдя до края границы съемки нужно отключить клавишу CTRL, тогда слева или справа от линии появится квадрат, в центре которого находится точка начала соседнего галса. Нажав в любую область этого квадрата, точка привяжется к этой точке.

Заново зажав кнопку CTRL мы увидим желтый круг напротив точки перегиба предыдущей линии. Нажав в этот круг - точка установится в нужном месте для обеспечения перекрытия.

Таким образом нарисовав первый галс и пользуясь этими помощниками привязки можно очень быстро распланировать съемку любого объекта, создавая маршрут сложной формы.
В тех местах, где мы отключали CRTL система понимает, что не надо фотографировать, и при условии если включена галочка на против Interval в настройках фотографирования - фотографии делаться не будут. Экономя пространство на карте памяти, и сокращая время обработки.

Решим Aerial предназначен для планирования маршрута внутри контура съемки, но алгоритм учитывает все доступные параметры и создает максимально эффективные маршруты.
Выбрав режим планирования Aerial, первым делом устанавливаем точку старта, от куда будет производиться съемка.
От этой точки будут рассчитываться длины маршрутов и перепады высот. В случает невозможности добраться до выбранной точки старта, необходимо учесть разницу высот проектной точки старта и фактической.
Вокруг точки старта есть вспомогательный круг радиусом 2км, предназначенный для разделения большой площади съемки на отдельные базы. Радиус 2км взят из нашего опыта, основан на стабильности радиосвязи, максимальной эффективности полетов и минимизации расстояний от базы до начала и конца маршрута.
После указания точки старта начинается отрисовка контура, внутри которого будет строиться маршрут. Важно построить маршрут с запасом, так как построение маршрута выполняется внутри полигона. Для съемки с DJI Phantom 4 adv\pro\proV2 крайняя линия съемки должна быть как минимум по краю интересуемой площади, а чтоб на все площадь была полноценная 3д модель, необходимо чтоб запас был в 1 галс (линия маршрута).
Для съемки на DJI Mavic 2pro запас съемки должен быть минимум в 1 галс, для обеспечения точности (то есть по краю интересуемой съемки должен проходить второй галс (линия маршрута).
Сначала можно нарисовать предварительный контур, а потом скорректировать его для оптимальной съемки.
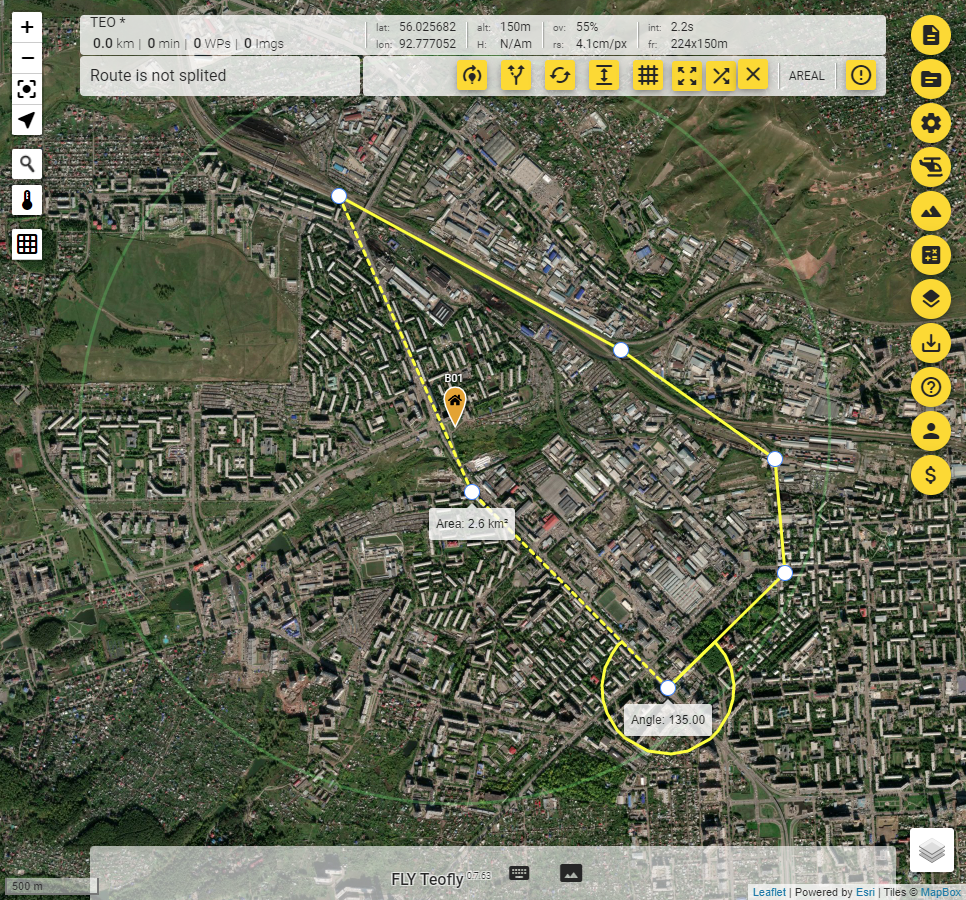
В момент отрисовки контура съемки, сервис выдает подсказки - угол с предыдущей линией, общую площадь участка.
Зажатие клавиши SHIFT дает привязку к углам равным 45градусов (0; 45: 90; и т.д.).
Клавиша ENTER завершает процесс создания контура съемки. Клавиша ESC позволяет удалить контур, предварительно выдав предупреждение.
При необходимости добавить угловую точку контура, необходимо в центре линии зажать полупрозрачный круг и потянуть его в нужное место.
 ==>
==> 
Завершив создание контура, система проектирует параллельные линии внутри нарисованного контура.
Красная индикация в верхнем левом углу означает что маршрут больше, чем может пролететь дрон на 1 аккумуляторе.
Максимальная длина маршрута задается в настройках. Из опыта - DJI Phantom 4 adv\proV1 может пролететь максимум 11,5км на новых аккумуляторах в хорошую погоду при скорости 9м\с. При большей или меньшей скорости полета расстояние снижается. DJI Phantom 4 pro V2 может пролететь до 14km при скорости полета 11м\с на свежих аккумуляторах. Это предельные числа, рекомендуем оставлять запас примерно 2км от максимальных значений и учитывать износ аккумулятора.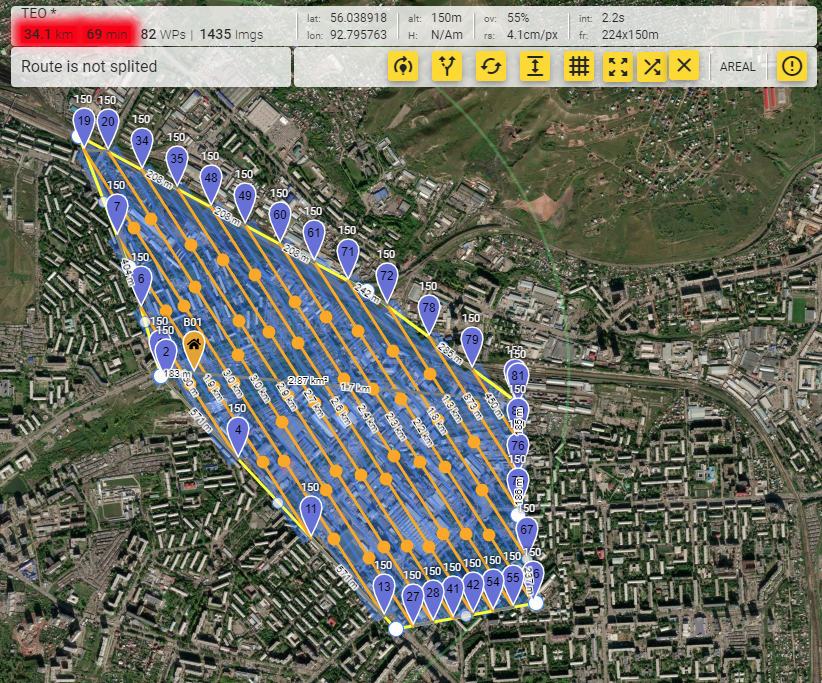
 - Build optimal route (построить оптимальный маршрут). Нажав на эту кнопку будет построен оптимальный маршрут.
- Build optimal route (построить оптимальный маршрут). Нажав на эту кнопку будет построен оптимальный маршрут.
 - Split route - (разделить маршрут) - разделение маршрута на отдельные маршруты, для оптимальной съемки. Алгоритм учитывает расположение точки старта и прерывает маршрут в оптимальном месте сокращая расстояния до начала и конца маршрута. Маршрут может закончиться на предполагаемых 50% аккумулятора, если по данным алгоритма замена аккумулятора в данный момент будет логичнее, продолжения полета на старом аккумуляторе, в результате чего, съемка будет выполнена быстрее.
- Split route - (разделить маршрут) - разделение маршрута на отдельные маршруты, для оптимальной съемки. Алгоритм учитывает расположение точки старта и прерывает маршрут в оптимальном месте сокращая расстояния до начала и конца маршрута. Маршрут может закончиться на предполагаемых 50% аккумулятора, если по данным алгоритма замена аккумулятора в данный момент будет логичнее, продолжения полета на старом аккумуляторе, в результате чего, съемка будет выполнена быстрее.
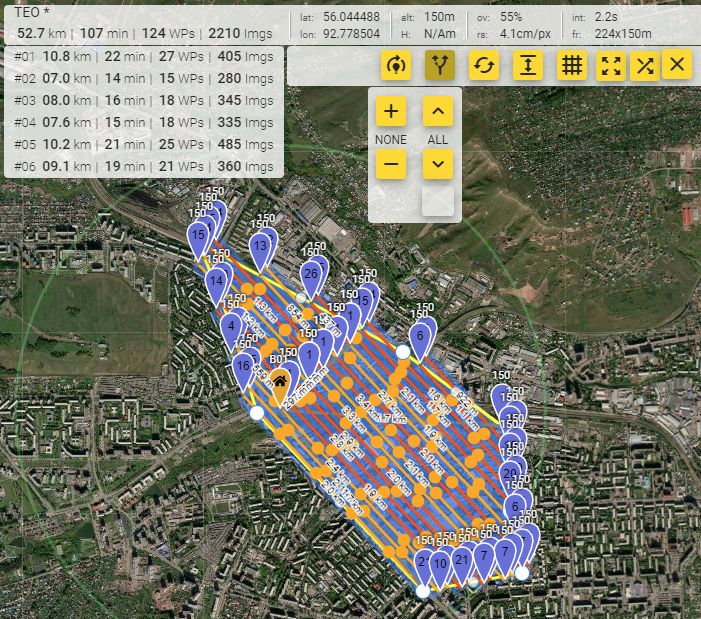
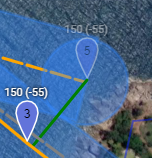
Выполнив разделение на маршруты, слева вверху появляется перечень маршрутов с их характеристиками (номер маршрута, протяженность в километрах, протяженность в минутах, количество путевых точек, примерное количество фотографий).
Под кнопкой разделения маршрута, появляется кнопки переключения маршрутов (стрелки слева) и кнопки изменения длины выбранного маршрута (кнопки +\- слева) - позволяет скорректировать начало точку окончания каждого маршрута по отдельности. Изменение первого маршрута влечет за собой автоматическое изменение следующих маршрутов.
Как видно длина маршрута значительно отличается, это связано с расположением точки старта.
При экспорте у каждого маршрута будет указан номер базы и номер маршрута и наименование проекта.
 - rotate - (изменение азимута маршрута) - позволяет изменить азимут маршрута.
- rotate - (изменение азимута маршрута) - позволяет изменить азимут маршрута.
Слева внизу появляется круг, с помощью которого можно задать произвольный радиус.  каждое нажатие на эту кнопку поворачивает маршрут на азимут каждой из сторон контура по очереди.
каждое нажатие на эту кнопку поворачивает маршрут на азимут каждой из сторон контура по очереди.
 - overlap scal - Масштаб перекрытия. Инструмент для профессионалов.
- overlap scal - Масштаб перекрытия. Инструмент для профессионалов.
 - grid options - настройки сетки полета.
- grid options - настройки сетки полета.
 - double grid - включение перпендикулярных маршрутов. Такой режим съемки улучшает построение 3D модели для застроенной территории. В настройках можно задать изменение угла наклона камеры отдельно для этих линий, для лучшей отрисовки фасадов.
- double grid - включение перпендикулярных маршрутов. Такой режим съемки улучшает построение 3D модели для застроенной территории. В настройках можно задать изменение угла наклона камеры отдельно для этих линий, для лучшей отрисовки фасадов.
 - initial corner - изменение точки начала маршрута.
- initial corner - изменение точки начала маршрута.
 - 90 degrees - начало соседних линий под углом 90 градусов, а не с границы контура.
- 90 degrees - начало соседних линий под углом 90 градусов, а не с границы контура.
 - turn off turn shots dots - включение точек выключения фотографирования. Добавляет точку в маршруте перед поворотом так, чтоб крайняя фотография была сделана до поворота.
- turn off turn shots dots - включение точек выключения фотографирования. Добавляет точку в маршруте перед поворотом так, чтоб крайняя фотография была сделана до поворота.
 - uEX - увеличивает галс (линию маршрута) перед началом маршрута и в конце маршрута, для создания буфера для начала остановки фотографирования за пределами контура.
- uEX - увеличивает галс (линию маршрута) перед началом маршрута и в конце маршрута, для создания буфера для начала остановки фотографирования за пределами контура.
 - convert route to waypoints - конвертировать маршрут до примитивного waypoints (путевые точки). Изначально маршрут созданный в teofly содержит данные о том где линия маршрута внутри контура, где разворот и другую информацию. Конвертация до примитивов означат что это будет просто маршрут по точкам без какой либо дополнительной информации.
- convert route to waypoints - конвертировать маршрут до примитивного waypoints (путевые точки). Изначально маршрут созданный в teofly содержит данные о том где линия маршрута внутри контура, где разворот и другую информацию. Конвертация до примитивов означат что это будет просто маршрут по точкам без какой либо дополнительной информации.
 - Clear current route - удалить текущий маршрут, редактирование которого активно.
- Clear current route - удалить текущий маршрут, редактирование которого активно.

Первым делом так же как и в предыдущие методах - устанавливаем точку старта, от куда планируем взлетать.
После этого указываем по порядку точки, по которым должен лететь дрон. В данном случае у маршрута нет параметров перекрытия, включения фотографирования, и соответственно без каких либо настроек связанных с аэрофотосъемкой.
Такого рода маршруты применяются для съемки видео-мониторинга объектов, когда необходимо чтоб коптер просто летел по ранее заданному маршруту.
 - Layers - дополнительные слои
- Layers - дополнительные слои

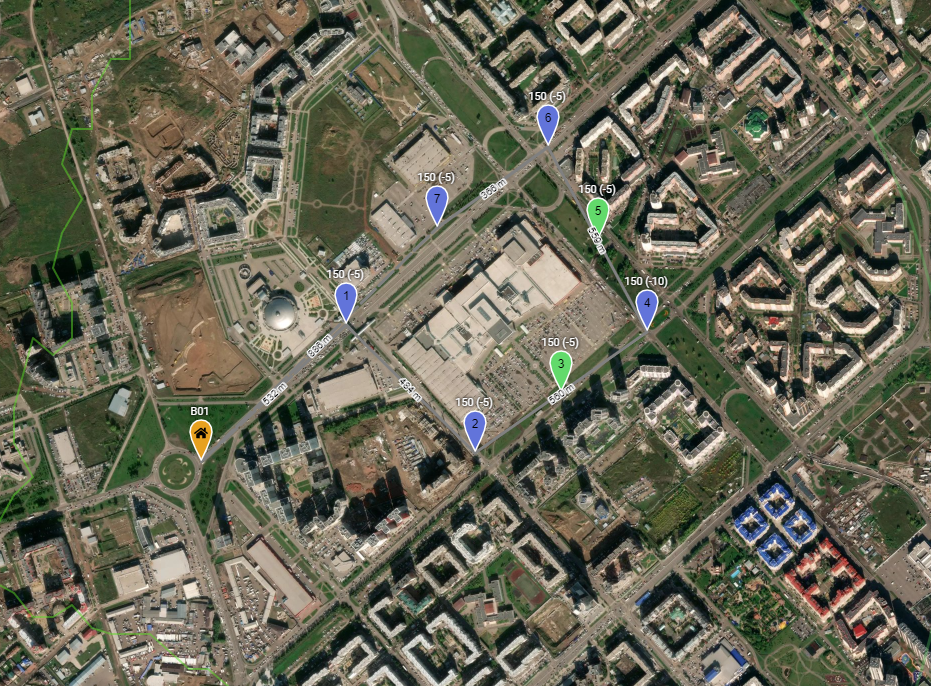
DJI NFZ (No Fly Zone) - запрещенные для полета зоны (описание зон смотреть тут https://wiki.teofly.com/books/dji-nfz-bespoletnye-zony/page/chto-takoe-nfz-gde-ikh-posmotret-i-kak-ponyat)
Как видно на картинке, зоны которые подгрузятся в пределах зоны работ можно скачать в формате KMZ или GPX, для дальнейшей загрузки в контроллер или навигатор.
KML\KMZ\GPX - загрузка своих данных в систему.
После загрузки их можно скачать в формате KMZ и GPX (так же возможно использовать как конвертер форматов.
DXF - загрузка DXF в систему.
Можно загрузить свой DXF файл и в специальное поле загрузить параметры проекции (для поиска проекции можно использовать нашего Telegram-бота https://wiki.teofly.com/books/telegram-boty-teoteam/page/at-findprjbot-find-prj)
После загрузки так же будет доступно скачать эти данные в формате KMZ и GPS.
Для России - ниже этой надписи слои необходимы только для пользователей из России.
Референтки - отображение сетей референтных (базовых) станций ПРИН, ТОПОНЕТ и EFT
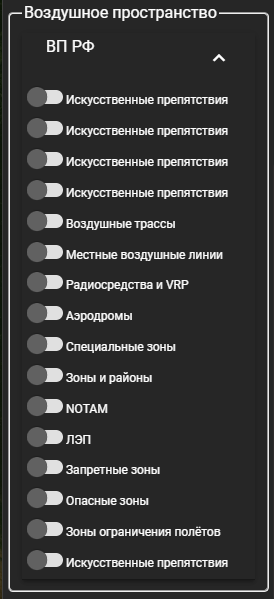
Воздушное пространство - отображение закрытых для полета зон воздушного пространства РФ.
А так же Искусственные препятствия, воздушные трассы, радиостанции, аэродромы, ЛЭП и пр.
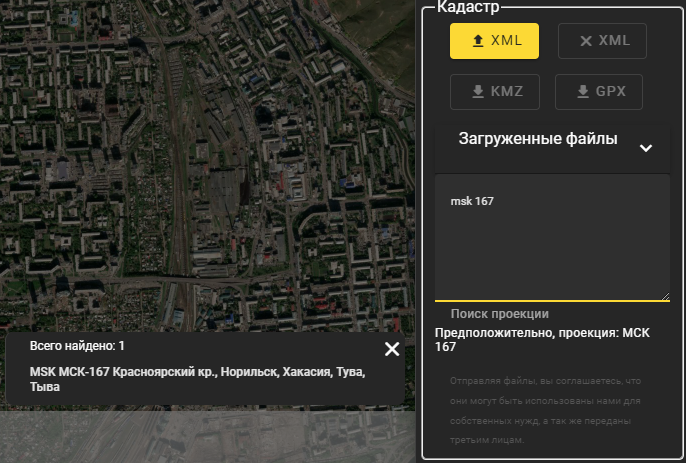
Импорт кадастрового плана XML
При загрузке кадастрового плана, сервис выдает подсказку, какая предположительно система координат.
Для указания системы координат, достаточно начать вводить имя системы координат и выбрать из выпадающего списка.
Так же можно вставить свои данные из PRJ файла. Указав систему координат автоматически начнется загрузка данных.
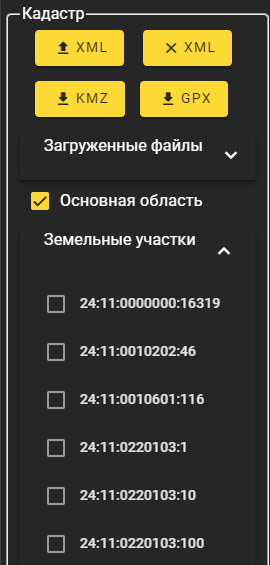
После импорта так же доступен экспорт данных в формат KMZ и GPX.
а так же возможно отобразить нужные участки для их отображения на плане. Изначально отображается только общая площадь.
 - Export routes - Экспорт маршрутов.
- Export routes - Экспорт маршрутов.

Export to litchi - Экспорт маршрутов в программу Litchi

TO LITCHI APP - экспорт маршрутов напрямую в личный кабинет Litchi
Для экспорт необходимо ввести свой логин и пароль, выбрать маршруты для экспорта и нажать ADD TO EXPORT
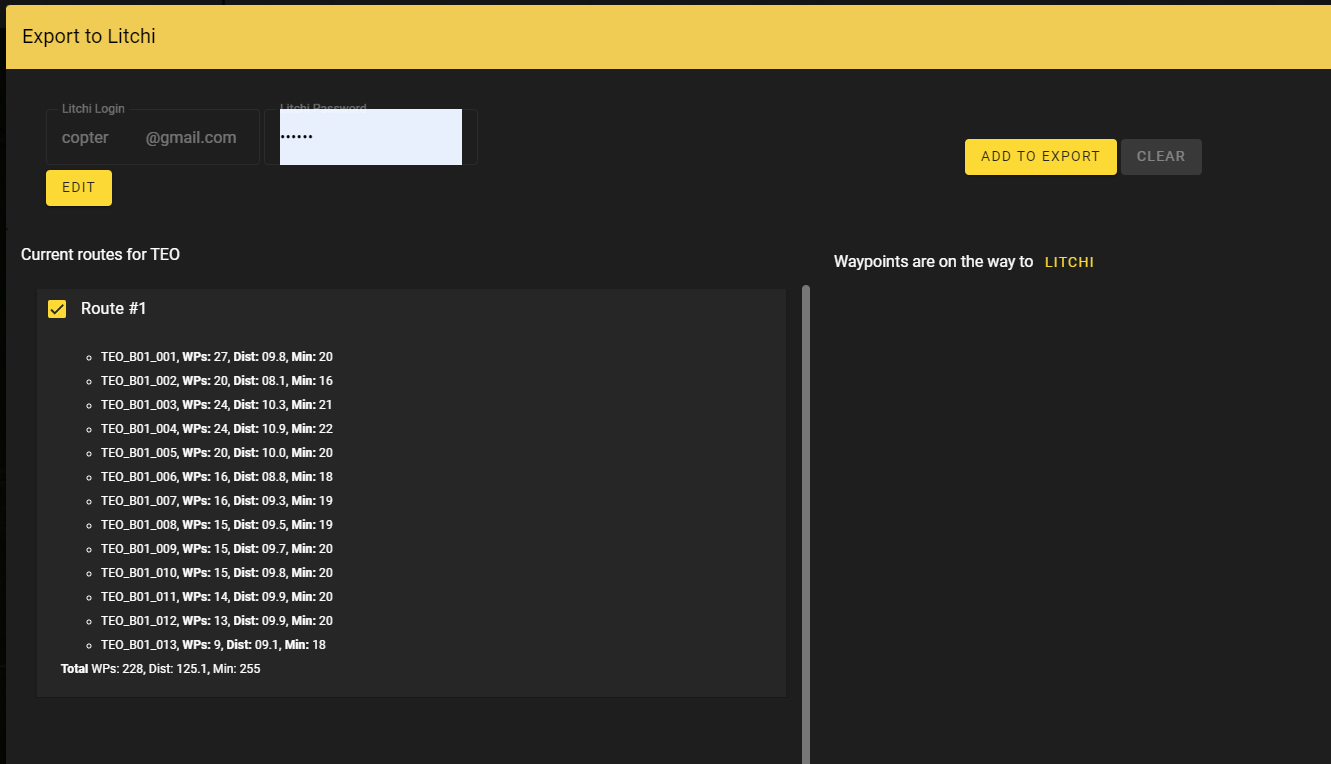
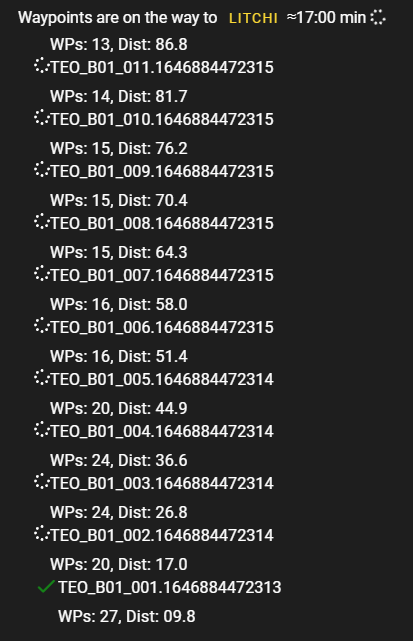
маршруты будут экспортироваться по очереди, вверху списка написано примерное время ожидания. Зеленой меткой обозначаются маршруты, экспорт которых завершен.
TO LITCHI FILE - экспорт в файл формата Litchi, подходит для передачи коллегам или для импорта напрямую в КЭШ в устройства на Android.
KML\KMZ - Экспорт в формат KML или KMZ для программы GS PRO или просто в KML для просмотра в сторонних сервисах.
Так же можно архивировать в формат KMZ или как ZIP
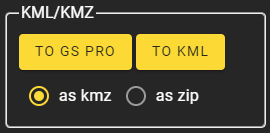
GPХ - формат для просмотра в спутниковом навигаторе.

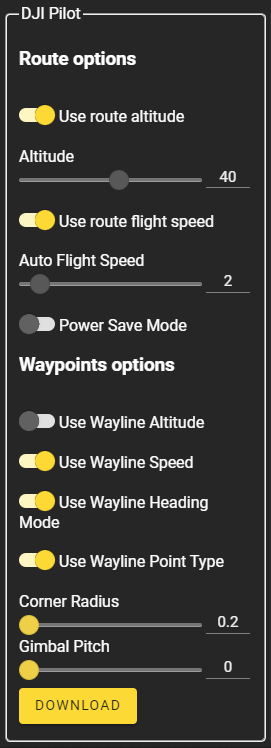
DJI Pilot - для экспорта в программу DJI Pilot
В качестве настроек маршрута доступно:
Use route altitude - использование высоты маршрута, либо можно задать определенную высоту.
Use route flight speed - использовать скорость полета маршрута, либо можно задать свою скорость полета.
Power save mode - режим сохранения энергии.
В качестве настрое путевых точек (waypoints) доступно:
Use Wayline Altitude - использовать высоту путевых линий
Use Wayline Speed - использовать скорость путевых линий
Use Wayline Heading Mode - использовать направление путевых линий
Use Wayline Point Type - использовать тип точек путевых линий
Corner radius - угол поворота.
Gimbal pitch - Угол наклона камеры.
 - Описание изменений и дополнений.
- Описание изменений и дополнений.

 - Настройки профиля.
- Настройки профиля.

На данный момент в настройках профиля доступен лишь выход из профиля.
 - Donations.
- Donations.

Сервис бесплатный, а лучшая благодарность за проделанную работу - оставить чаевые:)
No Comments