
5а) Проверка качества GNSS данных в RTKPLOT.
Процент фиксированного решения зависит от многих факторов, таких как:
-качество гнсс данных;
- количество общих спутников у базы и ровера;
- расположения спутников на небосводе;
- расстояния до базы;
- частота записи данные у базы и у ровера;
- общее время работы базы и ровера;
- время от включения базы и ровера до первого снимка.
Для того, с чтоб оценить качество GNSS данных, необходимо RINEX файл открыть в приложении RTKPLOT.
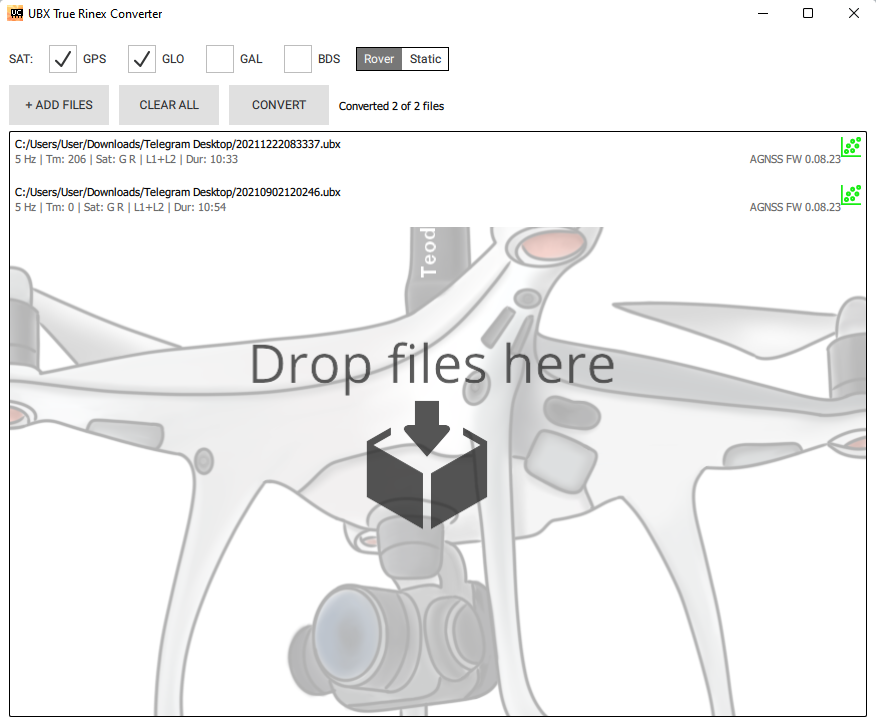
Пользователям квадрокоптеров Teodrone достаточно загрузить нужный UBX файл в UBX Converter, при условии что во время полёта прошивка платы AGNSS была не старше версии 0.8.23. (Скачать конвертер - https://t.me/teodrone/384)
После добавления нужного файла (или нескольких файлов), необходимо нажать кнопку CONVERT, после чего появится кнопка открытия файла в RTKPLOT - ![]()
В случае если у вас была старая прошивка, ее обязательно необходимо обновить (смотри страницу о обновлению платы AGNSS - https://wiki.teofly.com/books/teodrone-instruktsiya-po-ekspluatatsii-gnss-kvadrokoptera-teodron/page/1-d-obnovlenie-fw-plate-agnss), а для конвертации необходимо использовать RTKCONV (рекомендуем скачать по ссылке https://t.me/TeokitEN/9606 с проверенными настройками).
В RTKCONV добавляем нужный файл и проверить, чтоб был выбран формат u-blox и жмём кнопку conv, после чего файлы OBS и NAV появятся в той же папке, где лежит UBX файл.
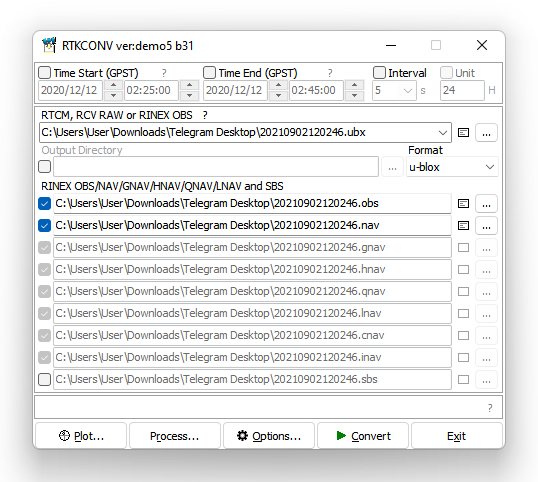
Дальше необходимо нажать кнопку PLOT, для открытия этого файла в RTKPLOT.
Первым делом смотрим SNR сигнала по частотам L1 и L2.
В хороших условиях сигнал SNR ровный, от 35 до 52 (крайние спутники, которые в районе горизонта будут ниже 35, но они и не идут в расчёт).
Так же открываем SAT VIS -видимость спутника и анализируем количество видимых спутников, наличия потери фазы.
Как выглядит глушилка:
Глушилки бывают разные, есть глушилки, которыми пользуются водители фур, чтобы избежать плату за Платон, бывают стационарные глушилки, которые работают постоянно, либо включаются при обнаружении радиосигнала квадрокоптера.
Глушилка в первую очередь понижает SNR сигнал.
Смотрим в какой момент есть понижение сигнала и сопоставляем с траекторией полёта, а также с положением фиксированных/плавающих решений (в этом поможет kml файл который выдаёт бот, по запросу /kml после обработки файлов).
Автомобильная глушилка фур часто проявляется в районе автостоянок, где отдыхают водители, а так же периодически вдоль трассы, но зависит от траектории полёта квадрокоптера. Если коптер летел поперёк трассы, то глушилка будет волнообразной, по мере приближения и удаления фуры.
Если коптер летел вдоль трассы, то возможно такое же волнообразное поведение если фура ехала на встречу, либо более долгое, если фура ехала в одном направлении с коптером.
Воздействие этих глушилок до 150м очень сильно влияет на фиксированное решение, а так же на полёт коптера по маршруту. До 400м заметно возврате глушилки, но проект по маршруту и обработка данных уже заметно стабильны.
Стационарные глушилки немного сильнее автомобильных, и обычно включаются автоматически при появлении радиосигналов с квадрокоптера. Обычно они установлены около военных объектов, заводов, важных социальных и инфраструктурных объектов, мусорных свалок и т.п.
Обычно в этих местах квадрокоптер теряет GPS сигнал и переходить в решим ATTI, либо количество спутников м минимально, если коптер летел с краю действия глушилки.
Еще одна причина отсутствия фиксированного решения - потеря фазы спутникового сигнала.
Обычно это происходит по какой то механической причине. В большинстве известных нам случаев - из за сильного потока воздуха направленного на ГНСС плату. После восстановления фазы, еще примерно минуту данные могут не иметь фиксированного решения.
No Comments