LizaAlert
Раздел посвящен спасательному отряду и работе Теофлай сервисов в нем.
- Применение БПЛА на поисково-спасательных работах
- Краткое и простое руководство
- Введение
- Регистрация в системах Teofly и Litchi
- Teofly. Начало работы
- Teofly. Настройки приложения, дрона и камеры
- Teofly. Настройки рельефа SRTM
- Teofly. Планирование миссий. Начало работы. Линейные маршруты
- Teofly. Планирование миссий. Маршрут внутри полигона
- Teofly. Экспорт маршрута
- Teofly. Дополнительные возможности. Слои
- Litchi. Подготовка к полёту и выполнение миссии
- Litchi. Важная информация. Замена батарей
- Краткий чек-лист
Применение БПЛА на поисково-спасательных работах
Беспилотники помогают в осмотре больших пространств и труднодоступных с земли, но открытых с воздуха зон поиска, заменяя пеших поисковиков.
Решаемые БПЛА задачи это:
- Оперативный поиск по визуальным ориентирам;
- Визуальный прочёс;
- Разведка труднопроходимых и опасных участков;
- Работа в городской среде;
Работа совместно с подразделением ЛНС (лес на связи) по определению координат БВП; - Свободная аэрофотосъёмка.
Визуально, с помощью беспилотника можно обнаружить дым, огонь, фонарь, фонарик или экран телефона и т.д. Стандартными методами поиска с БПЛА можно обнаружить всё, что угодно - начиная от подозрительных предметов или артефактов, частей одежды и т.п. и заканчивая непосредственно БВП.
Места поиска с помощью БПЛА это:
- Открытые пространства (поля, луга, степь, редкий лес);
- Водные акватории (реки, водоёмы, болота);
- Опасные участки (завалы, буреломы, песчаные карьеры, обрывы и т.п.).
Ограничениями использования БПЛА являются:
- Особенности местности (лес, горы);
- Метеоусловия (БПЛА не работает в дождь, снег, сильный ветер; имеет ограничения по температуре воздуха);
- Помехи, глушилки, плохой сигнал GPS;
- Световой день (есть исключения).
- Полёты БПЛА осуществляются исключительно после закрытия воздушного пространства. Пилот должен находиться на постоянной связи с авиадиспетчером зонального центра ОрВД.
Метод применения.
БПЛА производит серию фотографий земной поверхности под углом 90°. Высота полёта - от 30 до 90 метров, в зависимости от модели БПЛА. Наиболее распространенные высоты - 40-50м. Фотографии отсматриваются после выполнения миссии с помощью нейросети и группы просмотра и анализа.
Оператор БПЛА получает задачи от координатора поиска. Далее, он оценивает местность на возможность проведения ПСР с помощью БПЛА. Происходит закрытие воздушного пространства, установка КО. Составляется полетное задание. Оператор БПЛА выезжает на место ПСР, при необходимости корректирует полетное задание и прогружает его в дрон. Дрон в автоматическом режиме выполняет задачу. Далее, оператор БПЛА выгружает полученные фотографии с носителя дрона, производит оперативный, черновой отсмотр материалов вручную или с помощью нейросети и загружает фотографии для просмотра ГПА.
Один БПЛА Mavic 2 pro за световой день способен отработать площадь около 50га. Промышленные дроны и БПЛА самолетного типа могут отработать площадь более 50га.
Краткое и простое руководство
По выполнению полётных миссий на ПСР с помощью планировщика Teofly и полётной программы Litchi
Введение
Почему мы выбираем для полёта связку программ Teofly и Litchi?
Для поисково-спасательных работ (далее ПСР подходят разные дроны. На момент написания этого руководства (октябрь 2022 года) дроны, пригодные к ПСР можно условно разделить на три категории:
- «Старые» потребительские дроны DJI и дроны Autel (DJI Mavic 1 Pro, DJI Mavic Air, DJI Mavic 2 Pro, DJI Mavic 2 Zoom, DJI Mavic 2 Enterprise Dual, DJI Mavic 2 Enterprise Advanced, DJI Phantom 4, DJI Phantom 4 Pro, DJI Phantom 4 Pro+, DJI Phantom 4 Pro v.2, Autel Evo 2 Pro и т.п.). Они хороши тем, что обладают встроенным автопилотом и при потере связи с пультом способны завершить миссию.
- Профессиональные дроны DJI серии Matrice. Эта линейка дронов хороша тем, что дрон способен нести разную полезную нагрузку (камера, лидар, тепловизор и т.д.), менее привередлив к погодным условиям, способен летать дольше по времени. При потере связи с пультом, дрон профессиональной линейки завершит миссию автономно.
- «Свежие» дроны от DJI (DJI Mavic Air2, DJI mini 2, DJI Air 2s, возможно в ближайшем будущем DJI Mavic 3 и DJI Mini 3). Эти дроны обладают пригодными к использованию на ПСР камерами, достаточным временем полёта, но, к сожалению, не имеют бортового автопилота и его роль выполняет смартфон/планшет либо смарт контроллер. То есть, при потере связи с пультом, дрон прервет миссию и выполнит условие, заданное оператором для сценария потери сигнала (вернётся в точку «дом», зависнет на месте либо приземлится).
Полётные миссии на ПСР для каждого вида дронов можно строить в разных программах, и если для профессиональной линейки дронов в большинстве случаев хватит своего софта (не требуется остановка в точках съемки, полёт происходит на большой высоте), то для линеек любительских дронов набор программ сильно ограничен.
При построении миссии на ПСР, оператор любительского дрона должен учитывать несколько важных параметров – погода, ветер, рельеф, камера (от неё зависит высота полёта), связь с интернетом.
- Погода. Перед выездом на ПСР обязательно проверьте погоду в месте проведения работ. Ни один дрон из любительских линеек не летает в дождь. В туман и при температуре около 0 могут возникнуть сложности.
- Ветер. В сильный, штормовой ветер лучше не летать. Пределы эксплуатации написаны в характеристиках дрона. Хорошего результата съемки в сильный ветер вы не получите – будут смазы. Если ветер приемлем для полёта, оператор должен обязательно учитывать направление ветра и корректировать время возврата дрона в точку «дом». Помните, что при движении дрона против ветра расход заряда батареи может сильно увеличиться.
- Рельеф. Дроны любительских линеек на ПСР летают на небольшой высоте. В зависимости от модели дрона это, как правило, высоты от 30 до 55 метров. Если дрон в полёте не будет следовать рельефу местности - есть очень высокая вероятность его потери.
- Связь с интернетом. Для корректной работы ПО управления полётом, желательна связь смартфона/планшета/контроллера с интернетом. Он требуется для загрузки карт, в случае работы с Teofly – для создания полётных миссий. Если вы знаете что в зоне ПСР связи и интернета не будет – вы должны заранее создать кэш карт в полётном приложении и создать полётные миссии для дрона.
КРИТИЧЕСКИ ВАЖНЫМ условием полёта дрона любительской серии с электронным затвором (вся линейка любительских дронов DJI кроме серии Phantom) для получения приемлемого качества фотографий, является условие остановки дрона во время выполнения полёта в точках съемки.
Teofly.
Бесплатный планировщик полётных миссий с веб интерфейсом. В этом как минус (невозможность работы без интернета), так и большой плюс (нет зависимости от типа устройства и операционной системы).
Teofly – планировщик, предназначенный для геодезистов, и из-за схожести их деятельности с деятельностью пилотов на ПСР, обладает широким спектром полезных функций, таких как:
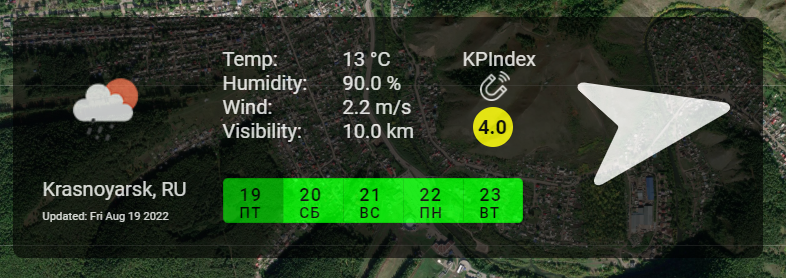
- Просмотр погоды в месте выполнения ПСР;
- Возможность загрузить «отрядную» сетку и треки пеших групп;
- Возможность посмотреть запретные для полётов зоны, структуру ВП в месте ПСР;
- Возможность посмотреть наличие препятствий и искусственных сооружений, таких как, например, ЛЭП;
- Возможность прямого экспорта в Litchi и экспорта с помощью переноса файлов миссий во многие другие полётные программы, к примеру, DJI Pilot (проверено и актуально для M300);
- Многие другие, не менее полезные возможности.
Litchi.
Является универсальной полётной программой, поддерживающей полёт по точкам с внятным и простым интерфейсом, способная выполнить большинство задач оператора. Поддерживает большинство дронов линейки DJI.
Регистрация в системах Teofly и Litchi
Для построения полётных миссий с помощью Teofly и Litchi вы должны зарегистрироваться в этих системах и получить логины и пароли для входа.
TEOFLY. Регистрация происходит следующим образом:
1. Необходимо пройти по ссылке https://fly.teofly.com/app/
2. Нажать кнопку REGISTER
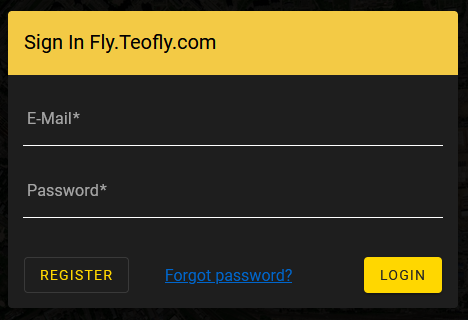
3. Откроется окно с предложением пройти регистрацию в боте
4. Скопируйте имя бота и найдите его в Telegram
5. Зайдите в бота, нажмите кнопку «Запустить»
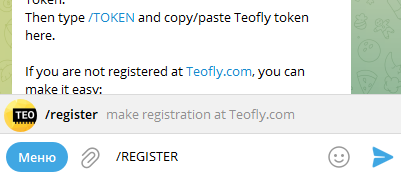
6. Отправьте боту команду /REGISTER
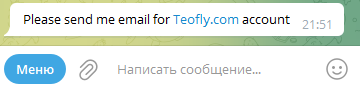
7. Отправьте боту свой адрес электронной почты. В ответ он выдаст вам логин и пароль для системы.
8. С полученными логином и паролем авторизуйтесь в системе по ссылке https://fly.teofly.com/app/
LITCHI. Регистрация происходит следующим образом:
1. Необходимо пройти по ссылке https://flylitchi.com/
2. На открывшемся сайте нажать кнопку

3. В появившемся окне нажать Register
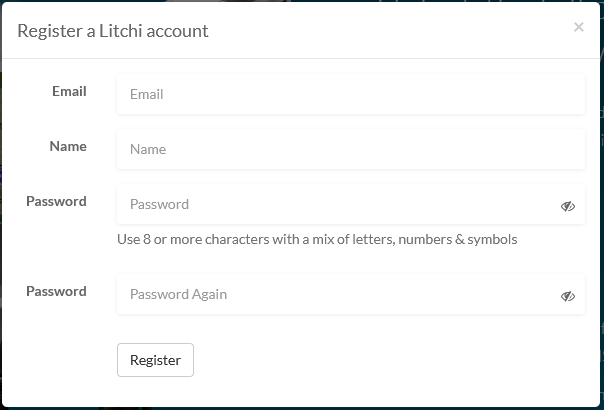
4. Ввести электронную почту, имя пользователя (может быть любым), два раза пароль (не менее 8 символов, должны быть буквы, цифры и спец. символы) и нажать Register.
5. Откроется окно с информацией об аккаунте. Регистрация завершена.
6. С именем и паролем авторизуйтесь в системе по ссылке https://flylitchi.com/
Teofly. Начало работы
Для начала работы с планировщиком, необходимо пройти по ссылке https://fly.teofly.com/app/
Пройдя по ссылке и авторизовавшись вы увидите основное рабочее окно программы.
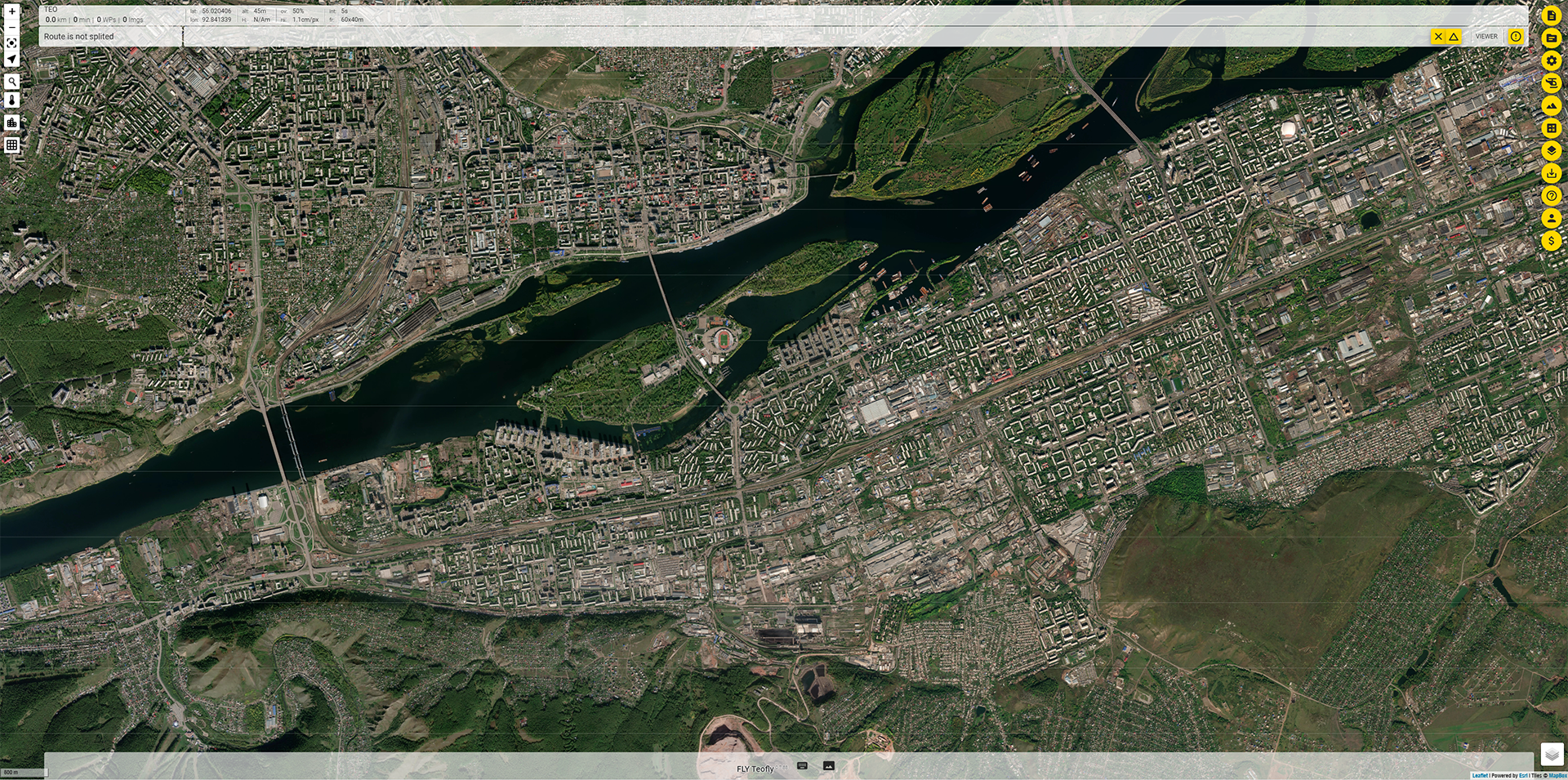
Оно делится на карту и 4 блока управляющих элементов левый, правый, верхний и нижний.
Левый блок выглядит так:

Кнопки управления масштабом

Ваше текущее местоположение

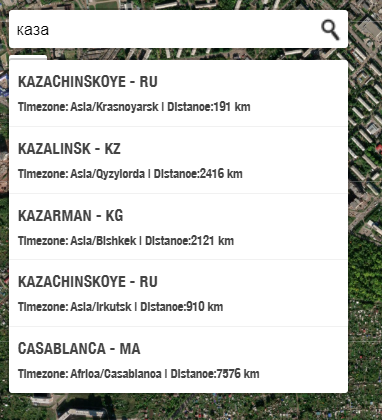
Кнопка поиска населённого пункта

Виджет погоды

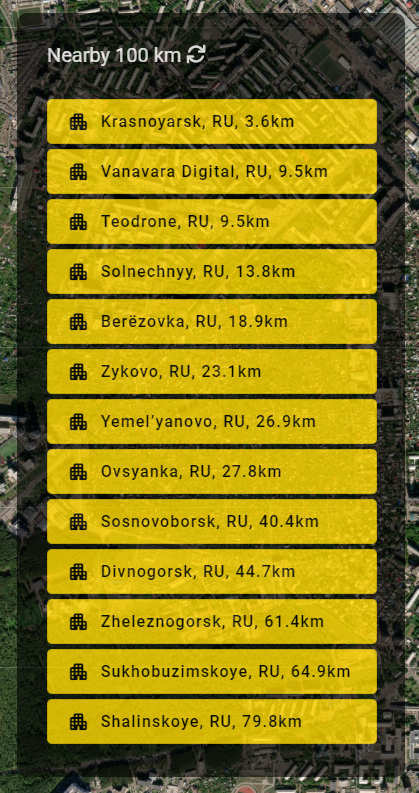
Населенные пункты поблизости

Блок управления сеткой (не отрядной)

Верхний блок управления (динамичный, много элементов управления появляется и исчезает в зависимости от режима миссии).

В левой части блока - параметры созданной миссии. В центре - координаты курсора. В правой части - параметры дрона и фотографирования.
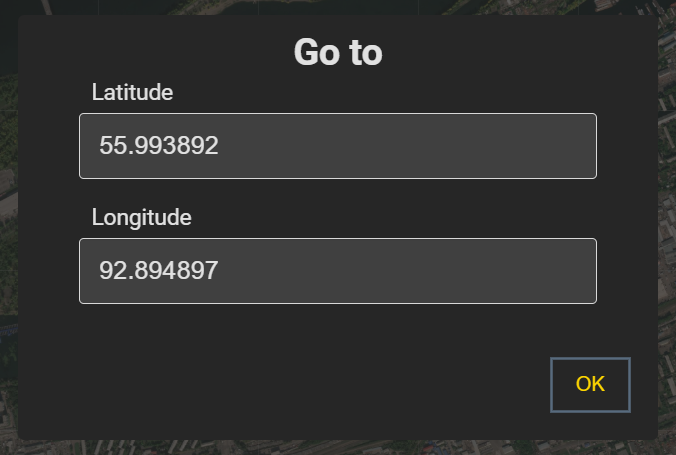
Для перемещения рабочего экрана по нужным вам координатам, необходимо кликнуть прямо в них.
Откроется окно, куда можно ввести координаты необходимого вам места.
Правый блок управления.
 |
Project properties (настройки проекта). В данной закладке можно задать имя проекта, просмотреть все маршруты, сохранить проект и очистить все маршруты (внимание, сохраните нежные маршруты перед удалением). |
 |
Open project (открыть проект). Тут можно открыть ранее сохраненные проекты. |
 |
Applications settings (настройки работы планировщика). |
 |
Drone Settings (Настройки коптера). |
 |
SRTM - работа с рельефом местности. SRTM - от названия Shuttle Radar Topography Mission - международного исследовательского проекта. |
 |
Drawing mode - Режим рисования. |
 |
Layers - дополнительные слои |
 |
Export routes - Экспорт маршрутов. |
Нижний блок управления. Включает в себя виртуальные кнопки клавиатуры, необходимые для планирования миссии (если нет клавиатуры) и кнопку профиля рельефа миссии.
Teofly. Настройки приложения, дрона и камеры
В первую очередь, до построения миссии, вам необходимо настроить планировщик, правильно настроить поведение дрона и выбрать параметры камеры.
1. Переходим в настройки планировщика, нажав кнопку
Появится меню настроек
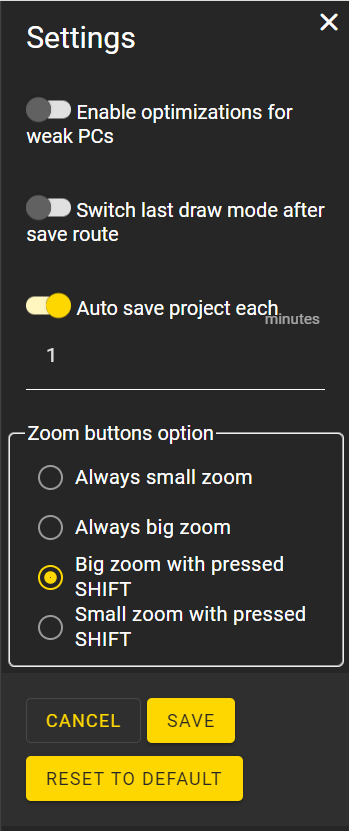
Enable optimizations for weak PCs - включить оптимизацию для слабых компьютеров.
Switch last draw mode after save route - начать рисовать новый маршрут тем же инструментом после окончания первого маршрута (после нажатия Enter).
Auto save project each - автосохранение через N минут.
После завершения настройки нажмите кнопку Save (сохранить). В дальнейшем, при входе с этого компьютера и браузера в эти настройки заходить не нужно.
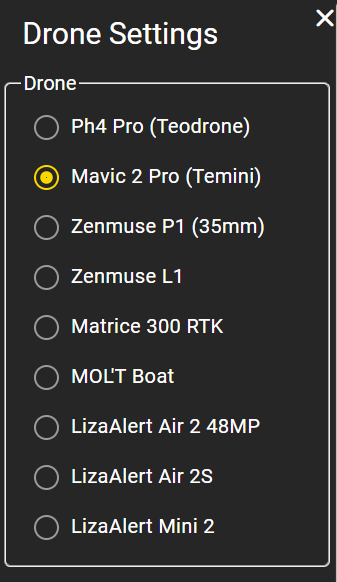
2. Переходим в настройки дрона и камеры, нажав кнопку
Из списка необходимо выбрать свою модель дрона.
Блок настройки полета.
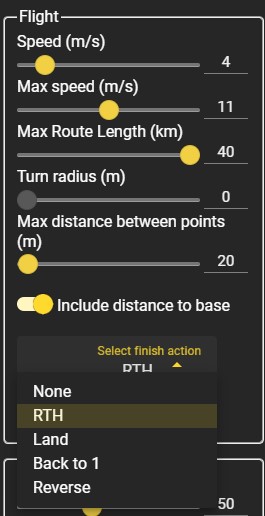
Speed - скорость полёта.
Max Route Length (km) - максимальная длина маршрута.
Turn radius (m) - радиус закругления маршрута.
Max diatance between point (m) - максимальное расстоянике между точками маршрута.
Include distance to base - учитывать расстояние от базы до первой точки маршрута и от последней точки маршрута до базы при расчете расстояния маршрута.
Select fiinish action - выбор действия дрона по окончании выполнения миссии.
Блок настройки фотографирования (не путать с настройками камеры).
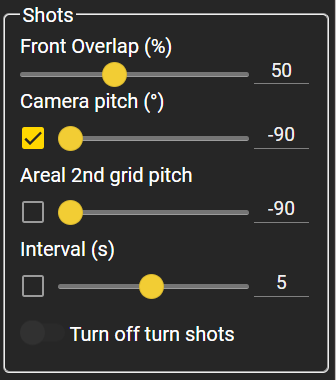
Front Overlap (%) - продольное перекрытие (между фотографиями внутри маршрута).
Camera pitch (0) - угол наклона камеры.
Areal 2nd grid pitch - наклон камеры для съёмки в режиме 2GRID непосредственно для второго направления (как правило, мы его не используем).
Interval (s) - интервал между снимками (выставляется автоматически, руками не трогаем).
Turn off turn shots - отключить снимки в точках разворота (в этом меню принципиально нет разницы - включен этот параметр или нет).
Блок настройки остановок дрона в точках фотографирования.
Все параметры обязательно должны быть включены (за исключением дронов DJI с механическим затвором).
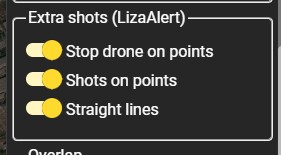
Stop drone on points - остановка дрона в точках съемки.
Shots on points - фотографирование в точках.
Straight lines - полёт по прямым линиям. Очень важный параметр. Всегда должен быть включен. Без него личи не производит действий в точках.
Блок настроек, влияющий на перекрытие.
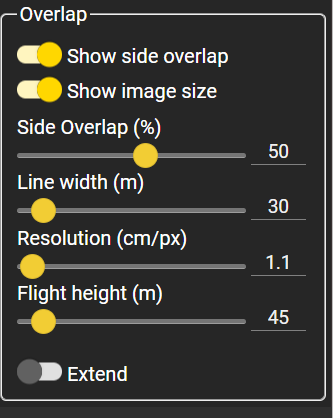
Show side overlap - показывать размер перекрытия. При построении маршрута будет подсвечена территория перекрытия. (Голубая область).
Show image size - показывает размер фотографии (оранжевая область).
Side overlap (%) - поперечное перекрытие, между снимками на соседних линиях маршрута (галсах).
Line width (m) - расстояние между двумя соседними линиями маршрута (зависит от перекрытия и высоты полета).
Resolution (cm/px) - GSD. Размер пикселя на земле (сантиметров на пиксель) (зависит от высоты полета, рекомендуемый GSD - от 1 до 1,3).
Flight height - высота полета (метров).
После завершения настройки нажмите кнопку Save (сохранить). В дальнейшем, при входе с этого компьютера и браузера в эти настройки заходить не нужно, за исключением случаев, когда необходимо поменять высоту полёта и перекрытие для разных условий поиска.
Teofly. Настройки рельефа SRTM
Переходим в настройки рельефа нажав кнопку
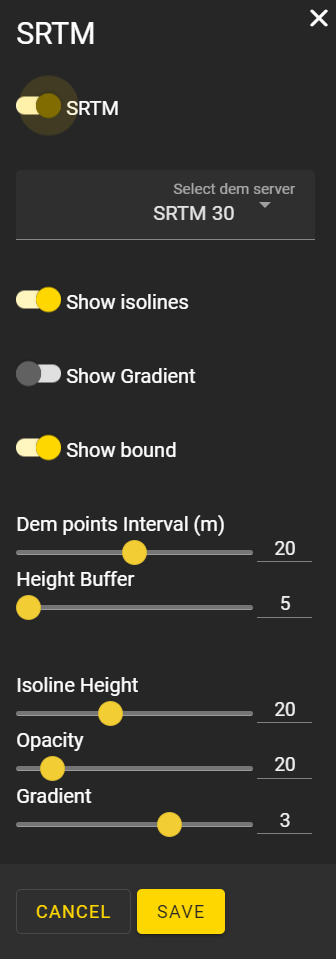
SRTM - переключатель рельефа. Необходимо включать перед началом планирования миссийй каждого сеанса работы.
Select DEM server - выбор сервера: SRTM 30 или DEM 90 или пользовательский TIFF файл с картой высот (ограничение - 5 мб).
Update SRTM - обновить карту высот.
Download SRTM - Загрузить карту высот на свой ПК.
Show isolines - показать изолинии рельефа.
Show gradient - раскрасить перепад высот градиентом.
Show bound - показать границу скачанного рельефа.
Dem points interval (m) - интервал между точками привязки рельефа.
Height Buffer - буфер высоты. Чем меньше значение, тем точнее дрон следует рельефу.
После завершения настройки нажмите кнопку Save (сохранить). В дальнейшем, при входе с этого компьютера и браузера в эти настройки заходить не нужно, за исключением кнопки активации рельефа.
Teofly. Планирование миссий. Начало работы. Линейные маршруты
Чтобы выполнить планирование полётной миссии, необходимо войти в режим планирования, нажав кнопку DRAWING MODE - Режим рисования.
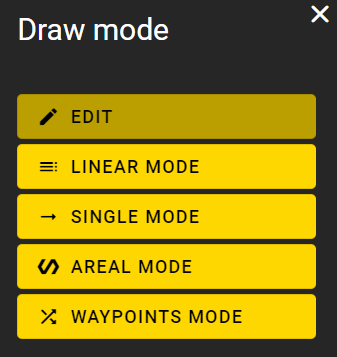
Edit - Режим редактирования миссии.
Linear mode - линейный маршрут в два галса. Рисует две параллельных линии, относительно нарисованной оси. Автоматически перерисовывает маршрут так, чтоб начало было максимально близко к точке старта.
Single mode - рисование сложного маршрута вручную с инструментами помощи планирования.
Areal mode - Площадное планирование.
Waypoints mode - произвольный полет по точкам.
Линейные маршруты

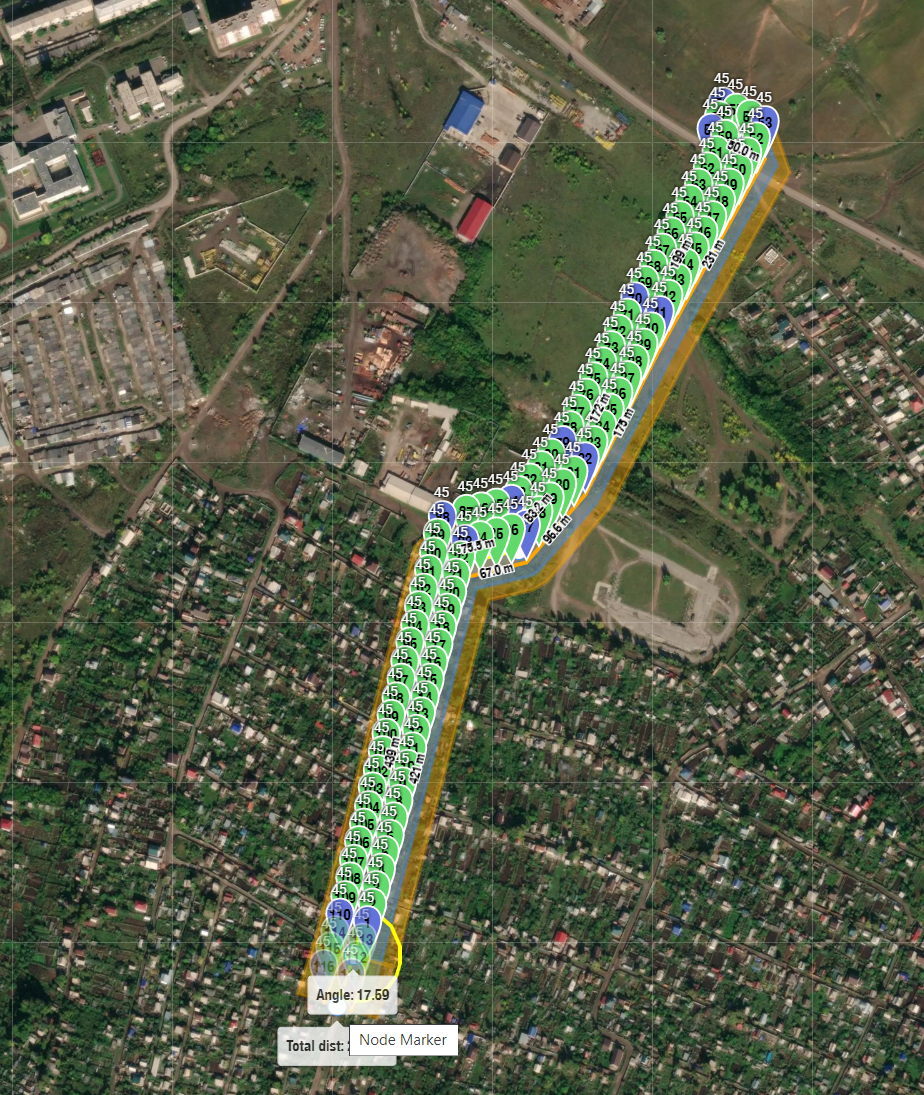
Режим, предназначенный для осмотра широких линейных ориентиров. Миссия автоматически рисуется в два галса.
Выбрав режим Linear, необходимо удерживая кнопку Ctrl нарисовать ось съемки, а после завершения рисования оси трассы нажать Enter, установить точку старта и ещё раз нажать Enter для завершения маршрута.
Маршрут будет автоматически перерисован относительно точки старта для оптимальной траектории полета и исключения лишних перелетов до начала и конца маршрута.


Режим, предназначенный для осмотра линейных ориентиров. Миссия автоматически рисуется в один галс.
В режиме Single первым делом устанавливается точка взлета, и от нее уже идет планирование маршрута, удерживая кнопку Ctrl.
После указания точки взлета, вокруг нее появляется круг радиусом 2км. Это вспомогательный круг, рассчитан на ограничение области планирования с одной точка взлета. и при необходимости снимать бОльшую площадь, рекомендуем разбивать на несколько точек взлета.
Зажав кнопку CTRL при рисовании маршрута, мы сообщаем системе, чтоб в этом месте будет выполняться фотографирование. В этот момент система подсвечивает область перекрытия голубой полупрозрачной областью.
Когда ведем курсор, рядом с ним можно увидеть красную\желтую\зеленую перпендикулярную линию - это индикатор перекрытия с предыдущим отрезком. Когда горит линия, то установив точку перекрытие будет оптимальным. Этот инструмент пригождается когда разворот не буквой «П», а в одной точке и под углом коптер полетит обратно.
Для очистки текущего маршрута, в режиме редактирования (когда он цветной) используйте кнопку Clear current route в верхнем блоке управления.

Более подробно о построении линейных маршрутов и их расширенном использовании можно прочитать здесь.
Teofly. Планирование миссий. Маршрут внутри полигона

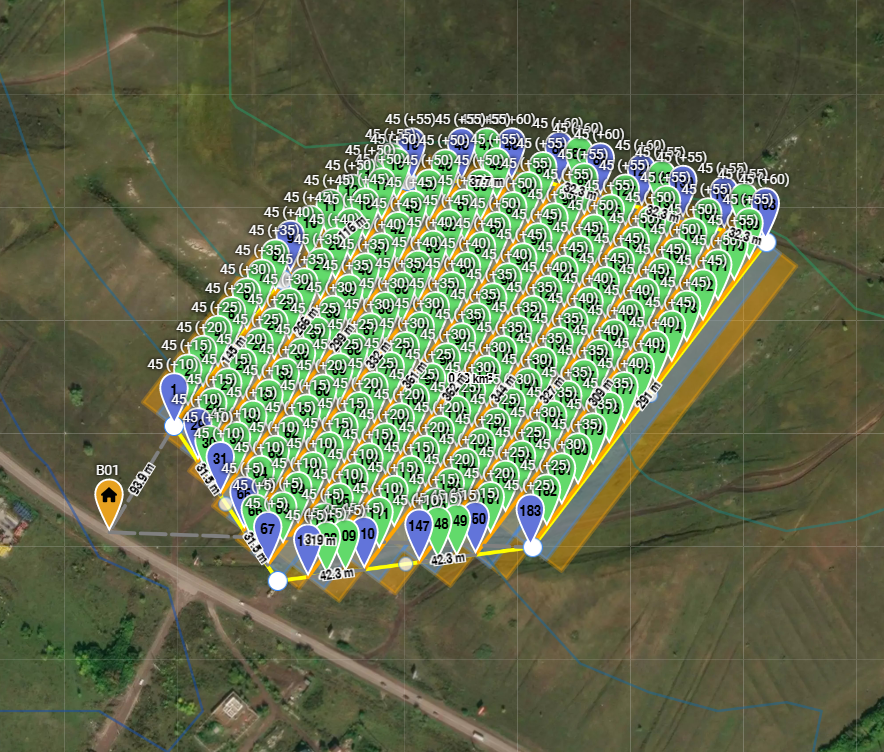
Режим Areal предназначен для планирования маршрута внутри контура съемки, но алгоритм учитывает все доступные параметры и создает максимально эффективные маршруты.
Выбрав режим планирования Areal, первым делом устанавливаем точку старта, от куда будет производиться съемка.
От этой точки будут рассчитываться длины маршрутов и перепады высот. В случает невозможности добраться до выбранной точки старта, необходимо учесть разницу высот проектной точки старта и фактической.
Вокруг точки старта есть вспомогательный круг радиусом 2км, предназначенный для разделения большой площади съемки на отдельные базы. Радиус 2км взят из нашего опыта, основан на стабильности радиосвязи, максимальной эффективности полетов и минимизации расстояний от базы до начала и конца маршрута.
После указания точки старта начинается отрисовка контура, внутри которого будет строиться маршрут. Сначала можно нарисовать предварительный контур, а потом скорректировать его для оптимальной съемки.
Для завершения рисования маршрута не обязательно ставить последнюю точку полигона в первую. Достаточно нажать Enter. Если у вас планшет, то кнопку Enter можно вызвать с помощью нижнего меню (иконка клавиатуры).
Далее, после построения маршрута, нам необходимо изменить азимут галсов на север-юг. Делается это инструментом rotate - (изменение азимута маршрута).


Справа внизу появляется круг, с помощью которого можно задать азимут маршрута.

Далее, после задания азимута маршрута, необходимо отрегулировать развороты дрона на концах галсов, чтобы избежать «неправильных» для ГПА фотографий в точках разворота дрона.
Для этого необходимо сделать небольшой вылет дрона за пределы полигона для разворота на следующий галс.
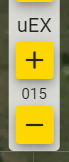
Нажимаем кнопку «Сетка» в верхнем меню.

В раскрывшемся меню кнопкой «+» ставим параметр uEX на 15м.
Включаем триггер turn off turn shots dots - включение точек выключения фотографирования.

Для завершения планирования миссии нажимаем кнопку Enter. Когда построенная миссия закрасится серым - это обозначает что планирование завершено и миссия готова к сохранению.
Для очистки текущего маршрута, в режиме редактирования (когда он цветной) используйте кнопку Clear current route в верхнем меню.
Teofly. Экспорт маршрута
Чтобы выполнить экспорт маршрутов из планировщика, необходимо нажать кнопку Export routes - экспорт маршрутов.

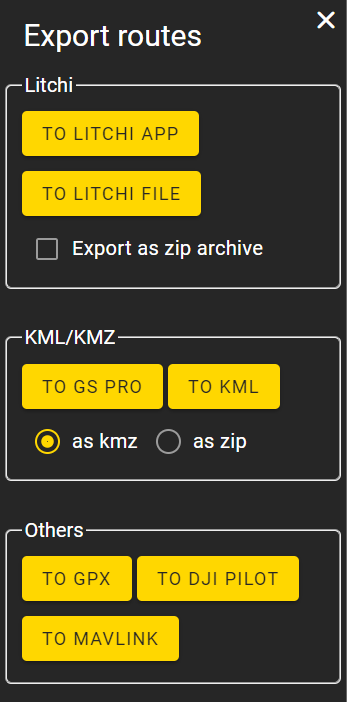
TO LITCHI APP - экспорт маршрутов напрямую в личный кабинет Litchi.
TO LITCHI FILE - экспорт в файл формата Litchi, подходит для передачи коллегам или для импорта напрямую в КЭШ в устройства на Android.
KML\KMZ - Экспорт в формат KML или KMZ для программы GS PRO или просто в KML для просмотра в сторонних сервисах.
Так же можно архивировать в формат KMZ или как ZIP.
DJI Pilot - для экспорта в программу DJI Pilot.
При нажатии на кнопку TO LITCHI APP открывается окно экспорта маршрута в личный кабинет Litchi.
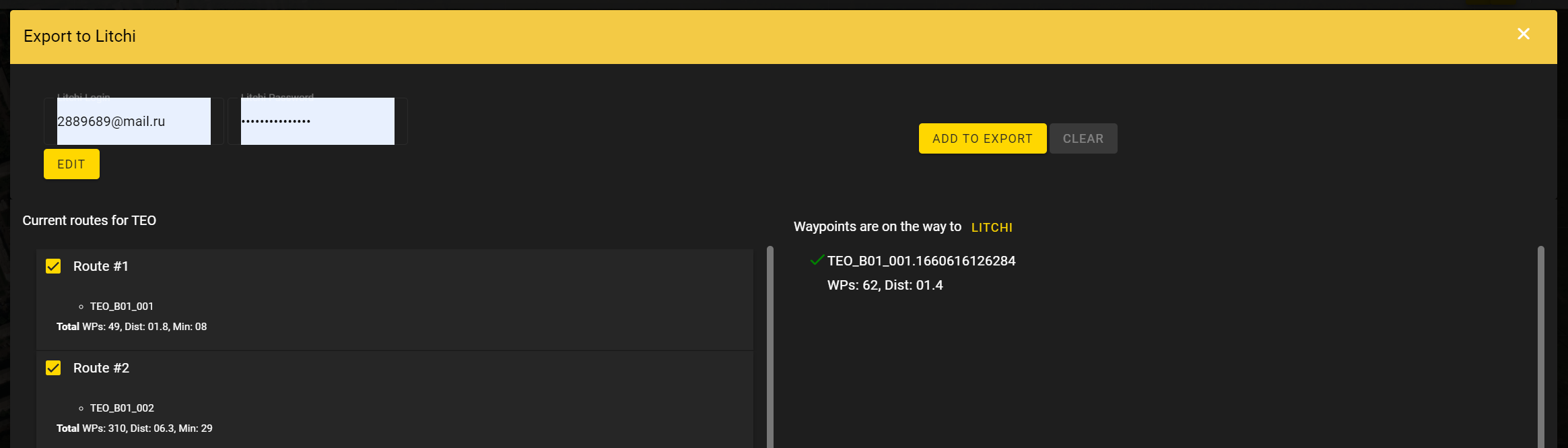
Для экспорта в litchi необходимо авторизоваться логином и паролем для личного кабинета Litchi в окне авторизации. Затем нажать кнопку Add to export. Немного подождать. После появления зелёной "галочки" маршрут появится в хабе Litchi и в мобильном приложении.
Teofly. Дополнительные возможности. Слои
Teofly позволяет использовать наложение на карту дополнительных данных, таких как отрядная сетка, различные искусственные сооружения, бесполётные зоны и многое другое. Для наложения данных необходимо использовать кнопкку Layers - дополнительные слои.

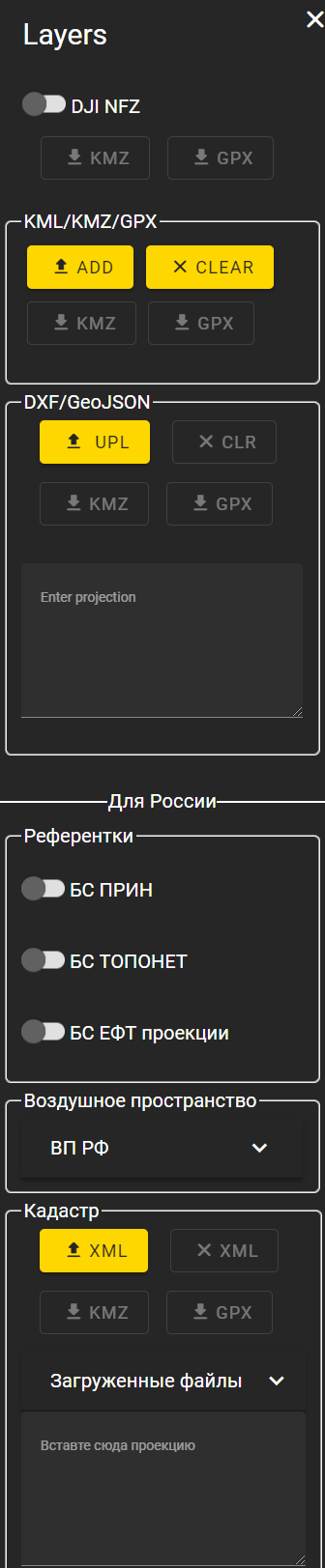 |
DJI NFZ (No Fly Zone) - запрещенные для полета зоны.
KML\KMZ\GPX - загрузка своих данных в систему.
DXF - загрузка DXF в систему.
Воздушное пространство - отображение закрытых для полета зон воздушного пространства РФ, а так же искусственных препятствий, воздушных трасс, радиостанций, аэродромов, ЛЭП и пр. |
Litchi. Подготовка к полёту и выполнение миссии
Перед выполнением миссии необходимо настроить камеру дрона в DJI Go, DJI Go4, DJI Fly.
Для этого необходимо подключить пульт к дрону. Запускаем DJI Go 4 либо DJI Fly. Если включен режим видео, то переключаем его на фото.
При наличии в вашей модели дрона ручной фокусировки, с помощью этого инструмента переключаем его в ручной режим и уводим в бесконечность.

Переходим в настройки камеры кнопкой «установки».

Нажатием на кнопку Auto переводим камеру в авторежим.

Настроив камеру, закрываем Dji Go4, Fly и запускаем программу Litchi.
Чтобы приступить к полёту в созданной миссии необходимо залогиниться в программе.
Для этого, в левом верхнем угле экрана нажимаем на иконку FPV.

Далее, в появившемся меню, нажимаем на самую правую кнопку (на ней будет написано Log in).

Переходим в режим полёта по точкам нажатием на иконку waypoint.

Программа перейдёт в режим полёта по точкам.

Нажимаем кнопку загрузки миссии.

В появившемся списке необходимо выбрать созданную в Teofly для текущего полёта миссию.
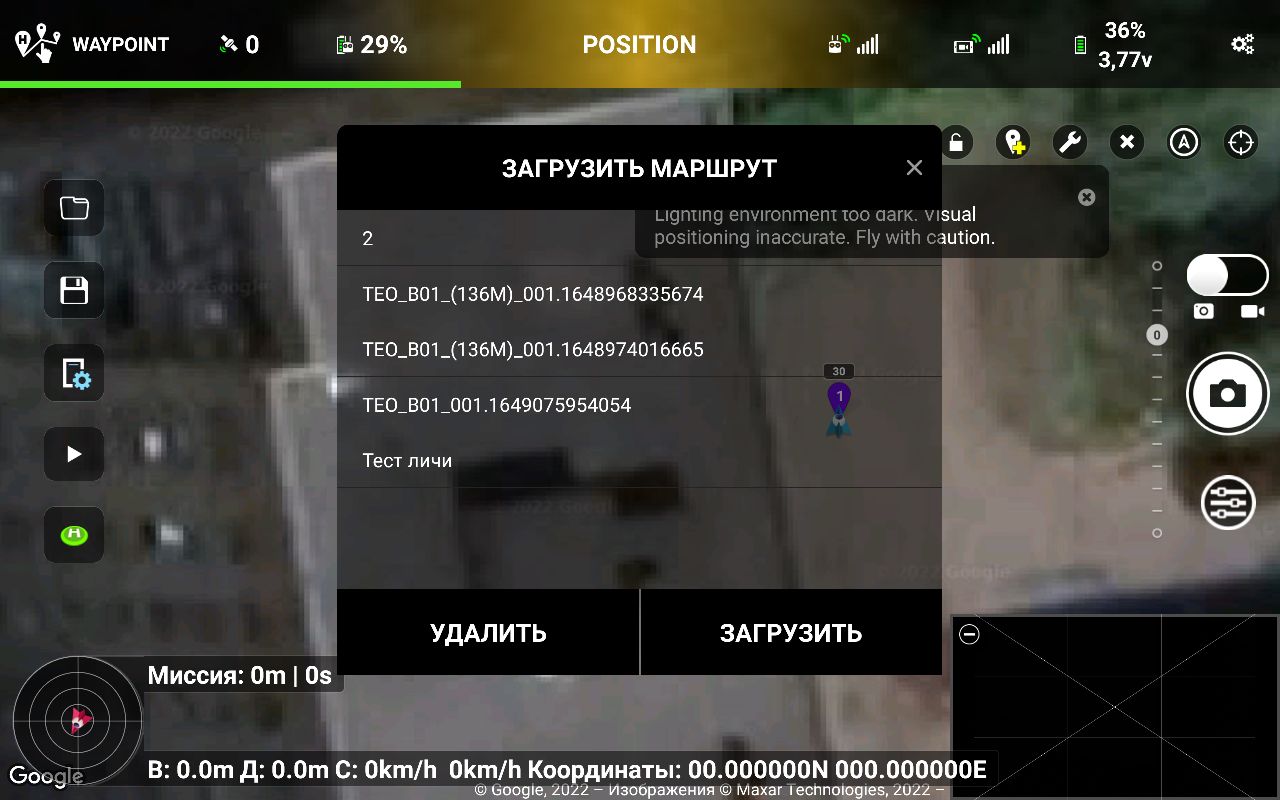
Всё готово к полёту.

Для старта миссии нажимаем кнопку Play на экране.

Litchi. Важная информация. Замена батарей
Правильно выбирайте место взлёта.
При выборе места взлёта старайтесь оказаться ближе к центру миссии. Это с даст вам экономию в батареях. Не взлетайте вплотную к лесу - он отлично гасит сигнал от пульта. Старайтесь соблюдать дистанцию. Учитывайте силу и направление ветра - это очень важно для возврата дрона домой. Если между точкой взлёта и местом выполнения миссии есть перепады высот, либо искусственные сооружения выше чем заданная высота полёта - сначала поднимите дрон на безопасную высоту, а лишь затем нажимайте кнопку «плей». Следите за светом на экране планшета/телефона/смартконтроллера. Недостаток либо избыток света регулируется параметром ev.
После замены батареи дрона, для продолжения выполнения миссии, начните её с той точки, откуда дрон вернулся. Она помечена «треком» желтого цвета на карте в Litchi. Если дрон летал без связи - достаточно пересчитать количество сделанных фото, чтобы понять номер точки.
Краткий чек-лист
В Teofly
- Развернуть галсы север-юг
- Сделать «вылеты» для разворота
- Проверить подключение рельефа
- В настройках дрона проверить что включен параметр «Straight lines»
В Litchi
- Убедиться что компас откалиброван
- Проверить настройки камеры
- Если у вас Mavic Air 2 - убедиться что камера стоит в режиме 48мп
- Не забыть про ветер
- Помнить об поднятии дрона выше препятствий между вами и местом выполнения миссии
- При необходимости, увеличить максимальную (не крейсерскую) скорость полёта в настройках миссии - это скорость, с которой дрон будет перемещаться между вами и маршрутом