TEODRONE. Инструкция по эксплуатации ГНСС Квадрокоптера ТЕОДРОН
на базе DJI Phantom 4 pro/adv/v2 с GNSS приемником AGNSS L2
- 1) Планирование миссий
- 1) а) Для чего нужно учитывать рельеф?
- 1) b) Советы по аэрофотосъемке
- Контрольные знаки
- 1) c) Рекомендации погоды для безопасного полета.
- 1) d) Обновление FW плате AGNSS
- 2) Подготовка Базовой станции
- 2) a) Использование базовой станции для обеспечения аэрофотосъемочных работ
- 3) Подготовка к полету.
- 3) a) Маркировка и расстановка опознаков
- 3) b) Полевое дешифрирование
- 3) c) Cfixer - размагничивание компаса.
- 4) Выполнение съемки
- 5) Скачивание данных с платы AGNSS L2
- 5а) Проверка качества GNSS данных в RTKPLOT.
- 6) Метки не равны фоткам
- 7) Обработка ГНСС данных в @TeoboxBot
- 8) ПО Teobox 2.4.10
- 9) подборка видео уроков
- Оглавление:
- 7) a) Подготовка RINEX для обработка в стороннем ПО (TBC, Manget, Credo и пр)
1) Планирование миссий
Ниже по тексту общие требования и рекомендации для планирование маршрутов аэрофотосъемки. Настоятельно рекомендуем их прочитать и понять.
После прочтения рекомендуем выполнять планирование в сервисе fly.teofly.com. Инструкция по ссылке https://wiki.teofly.com/books/teoflycom
Самое важное при планировании маршрутов - получить нужную детализацию 3д модели.
Программы для обработки изображений, основаны на автоматическом поиске тысяч общих точек изображения. Каждая характерная точка, обнаруженная на изображении, называется ключевой точкой. Когда обнаруживается, что 2 ключевые точки на 2 изображениях совпадают, они совпадают с ключевыми точками. Каждая группа правильно подобранных ключевых точек будет генерировать одну трехмерную точку. Когда между двумя изображениями наблюдается большое перекрытие, общая охваченная область больше, и вместе можно сопоставить больше ключевых точек. Чем больше будет ключевых точек, тем точнее можно будет вычислить трехмерные точки. Поэтому главное правило - высокое перекрытие между изображениями.
План изображения изображения имеет большое влияние на качество результатов, важно его разрабатывать.
- Общий случай: для проектов, которые включают лес, снег, водные объекты, сельскохозяйственные поля и / или другие территории, которые можно реконструировать.
- Лес и густая растительность: для проекта с участками, покрытыми лесом или густой растительностью.
- Ровный ландшафт с сельскохозяйственными полями.
- Реконструкция зданий: Для 3D моделирования зданий.
- Особые случаи: для снега, песка и водных поверхностей (океаны, озера, реки и т. Д.).
- Отображение коридоров: для проектов с линейной зоной интересов (дороги, реки и т. Д.).
- Несколько полетов: для проектов с изображений, снятыми за несколько полетов.
- Реконструкция города (видимые фасады): Для 3D городских городских территорий.
Общий случай.
В этом разделе представлены некоторые подсказки для местности, трудно нанести на карту, например, для местности со снегом, песком, озерами и т. Д.
Снег и песок не имеют визуального содержания из-за больших поверхностей. Следовательно:
- Используйте высокое перекрытие: не менее 85% фронтального и не менее 70% бокового .
- Установите соответствующие настройки экспозиции, чтобы получить как можно больше контраста в каждом изображении.
Водные поверхности практически не имеют визуального наполнения из-за больших площадей. Отражение солнца на воде и волнах нельзя использовать для визуального сопоставления.
- Океаны реконструировать невозможно.
- Чтобы реконструировать другие водные поверхности, такие как реки или озера , на каждом изображении должны быть элементы суши. Полет выше может помочь включить больше объектов суши.
Картографирование коридора
Для наложения на карту коридора, такая как железная дорога, дорога или река, требуется как минимум две линии маршрута (рис. 3). Опорные точки не требуются, но рекомендуются для повышения точности реконструкции. Для получения дополнительной информации о количестве и распределении опорных точек при картировании коридора.
Для двухколейной системы рекомендуется использовать не менее 85% фронтального и не менее 60% бокового перекрытия.
Можно использовать изображения надира или наклонные изображения. Для равнинной местности рекомендуется использовать изображения надира.
 |
| Рис. 3. План получения двухпутного изображения для картирования коридора. |
Если план получения изображения с двумя дорожками невозможен, можно использовать план получения изображения с одной дорожкой, если (рисунок 4):
- Перекрытие достаточно велико : продольное перекрытие не менее 85%.
- Наземные контрольные точки (GCP) определяются вдоль линии полета зигзагообразно или парно, с обоих сторон от линии полёта.
| Рис. 4. Однопутный полет НЕ РЕКОМЕНДУЕТСЯ. |
Множественные полеты
Можно обрабатывать изображения, снятые с нескольких полетов. При разработке различных планов получения изображений убедитесь, что:
- Каждый план захватывает изображения с достаточным перекрытием.
- Между двумя планами получения изображений имеется достаточное перекрытие (рис. 5).
- Различные планы взяты максимально при одинаковых условиях (направление солнца, погодные условия, отсутствие новостроек и т. Д.).
 |
 |
| Достаточно перекрытия между 2 рейсами | Недостаточное перекрытие между 2 рейсами |
| Рисунок 5. Перекрытие двух пролетов. | |
Реконструкция города (видимые фасады)
Для трехмерной реконструкции городских территорий требуется план получения изображения с двойной сеткой, чтобы все фасады зданий (север, запад, юг, восток) были видны на изображениях. Нахлест должен быть таким же, как и в общем случае.
 |
| Рисунок 7. План получения изображения с двойной сеткой. |
Чтобы фасады были видны, снимки следует делать под углом от 10 ° до 35 ° (0 ° - камера смотрит вниз). Если требуется много деталей, следует объединить аэрофотоснимки и наземные изображения.
Изображения должны иметь достаточное перекрытие в каждом наборе данных и между наборами данных. В таких случаях рекомендуется использовать опорные точки или ручные контрольные точки для правильной настройки различных наборов изображений.
1) а) Для чего нужно учитывать рельеф?
Планирование полета с учетом местности - это способ использовать модели местности для корректировки планов полета дрона. Использование планирования с учетом особенностей местности особенно важно, когда полеты выполняются в районах со значительными перепадами высот, например в горах, или на промышленных площадках, таких как открытые карьеры.
Также важно использовать ландшафт при осмотре или картировании очень больших объектов, поскольку небольшие изменения в ландшафте накапливаются в большие общие изменения на больших расстояниях.
Типичные варианты использования планирования полетов с учетом особенностей местности включают картографирование и осмотр шахт, линейную инфраструктуру (например, линии электропередач, железные дороги и т. Д.), Точное земледелие и многое другое.

1) b) Советы по аэрофотосъемке
Советы по аэрофотосъемке
Общие советы:
- Не устанавливайте поперечное перекрытие менее 60% и продольное перекрытие менее 80%, чтобы получить результаты хорошего качества.
- Не бойтесь делать больше снимков, чем требуется, избыток снимков предпочтительнее, чем их недостаточное количество, так как лишние изображения можно отключить перед обработкой.
- Не устанавливайте слишком медленную скорость затвора, иначе из-за движения камеры может возникнуть размытие.
- Рекомендуется использовать наземные опорные точки для повышения точности результатов.
- Не проводите воздушную съемку одного и того же района в течение всего дня. Условия освещенности могут меняться, и вы получите снимки одной и той же территории с разным освещением (например, длинные тени от одних и тех же структур, указывающие в совершенно разных направлениях и имеющие разные формы). В таком случае Metashape может не найти общие точки на перекрывающихся снимках.
Пример некорректных снимков


Лесные массивы:
- Не выполняйте аэрофотосъемку лесных участков ниже 180 метров над землей. Деревья движутся из-за ветра, и при съемке с небольшой высоты программа обработки может не найти общих точек на снимках.
- Не проводите воздушную съемку лесных массивов в безлистный сезон. Деревья без листьев имеют много тонких структур (ветки), поэтому будет сложно найти общие точки на снимках, и деревья будут реконструированы плохо.
Городские районы:
- Не избегайте выполнения двух перекрестных полетов, чтобы получить двойное перекрытие при выполнении аэрофотосъемки городских районов и захватить стены зданий со всех ракурсов.
- Не снимайте конструкции, построенные из блестящих и отражающих материалов в солнечную погоду.
Примеры некорректных снимков зданий


- В случае, если вам необходимо реконструировать детализированную 3D-модель, не используйте полёты только с надирными камерами, вместо этого используйте наклоненные камеры или комбинируйте полеты, но с различными углами её наклона. Такой подход поможет получить правильную модель и восстановление текстуры вертикальных поверхностей (например, стены здания).
Надирная камераНаклоненная камера


Районы с водными объектами:
- Не делайте снимки, захватывающие только водную поверхность, соотношение земли и воды на снимке должно быть 50/50.
Верное соотношение воды и землиНеверное соотношение воды и земли


- Рекомендуется проводить двойную или тройную аэрофотосъемку одного района с разной высоты, чтобы получить хорошие результаты при реконструкции водоемов.
- Не снимайте водоемы в солнечную погоду - отражения могут повлиять на реконструкцию.
Верный снимокНекорректный снимок


Горные районы:
- Не планируйте полет без актуальной подложки (модели высоты) на данную территорию.
- Не выполняйте аэрофотосъемку горных районов ниже 100 метров над землей.
- Рекомендуется проводить двойную или тройную аэрофотосъемку горного района с разной высоты, чтобы получить хорошие результаты реконструкции склона.
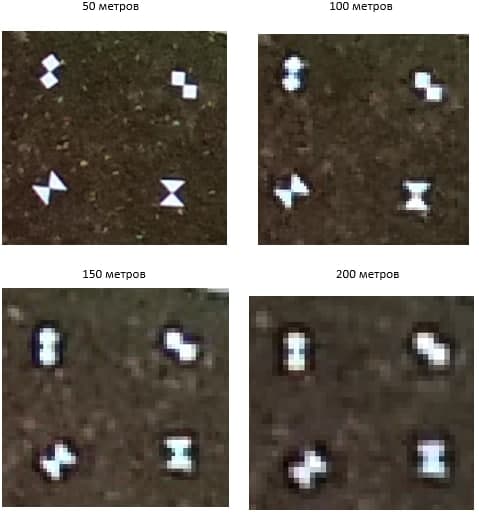
Контрольные знаки
Как выглядят контрольные знаки размером 25х25 см с разной высоты с коптера Teodrone на базе DJI Phantom 4 pro v2:
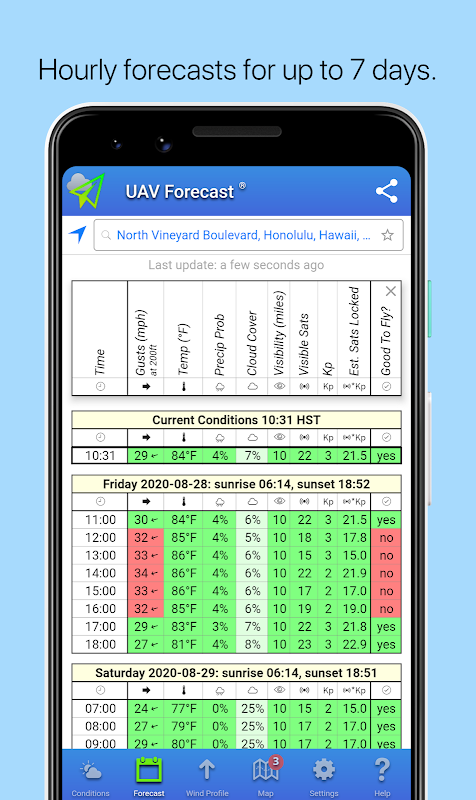
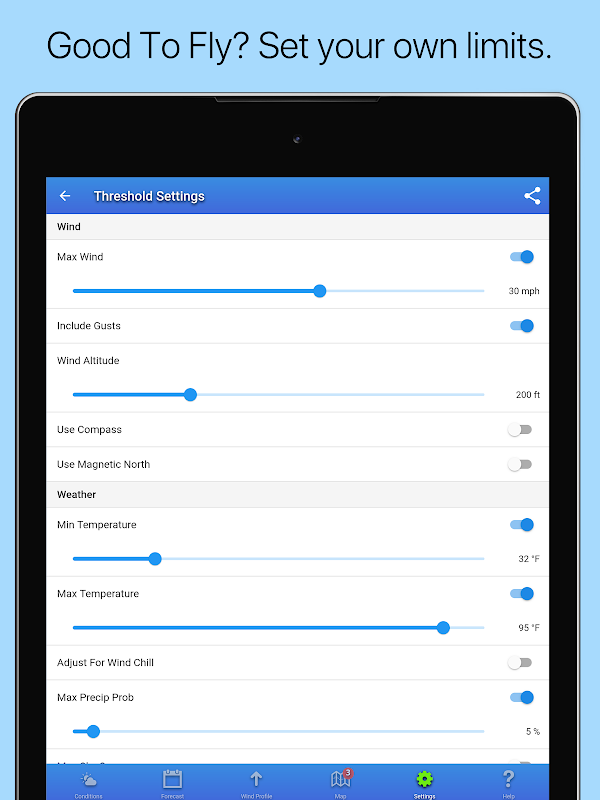
1) c) Рекомендации погоды для безопасного полета.
Смотрите прогноз погоды, спутники GPS, солнечную активность (Kp), бесполетные зоны и ограничения полетов - все в одном удобном инструменте. Необходимо отметить что данные бесполетных зон взяты с официального сайта https://www.dji.com/ru/flysafe/geo-map и могут отличатся от принятых в вашем регионе.
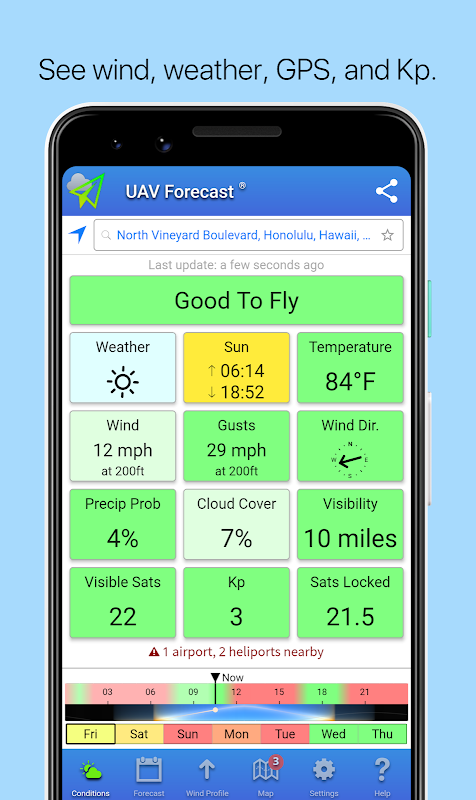
Что такое Kp-индекс и почему это важно?
Индекс Kp измеряет геомагнитные возмущения, вызванные солнечной активностью, по шкале от 0 (покой) до 9 (сильный шторм). Значение на уровне от 3 до 4 или ниже, как правило, безопасно для полета. Чем выше индекс Kp, тем выше вероятность того, что у Вас возникнут трудности с уверенным приёмом точных сигналов GPS.
Солнечная активность мешает сигналам GPS двумя способами, оба из-за возмущений в ионосфере:
- Это уменьшает отношение сигнал/шум и влияет на несущую частоту, в результате чего приемник теряет сигнал некоторых спутников. Вместо 9 спутников Вы можете поймать только 6, или число может колебаться от секунды к секунде.
- Это влияет на задержку сигнала при прохождении через ионосферу, делая неточным позиционирование по GPS, даже если приемник поймал все спутники.
Даже во время сильного шторма, степень, в которой Вы видите эти проблемы, будет зависеть от многих других факторов. Одним из основных факторов является Ваша широта: ионосферные возмущения сильнее в высоких и экваториальных широтах и менее заметны в средних широтах. Другим фактором является время суток: большинство помех возникает вечером между 8 часами вечера и полуночью. Эффекты также различаются: иногда всё проходит хорошо, но может случиться так, что Вы полностью потеряете захват спутников на несколько секунд или даже минуту, или, покажется, что у Вас хороший приём, но точность определения местоположения будет расходиться с действительностью на десятки метров.
Штормы также могут мешать радиоуправлению или электронике Вашего самолета.
В целом, во время солнечных штормов лучше соблюдать осторожность, хотя в большинстве случаев Вы не заметите никаких проблем. Счастливого полета!
Это вероятность выпадения любого вида осадков, включая дождь, снег, град, мокрый снег и т.д.
Высота спутника - это то, насколько высоко он находится над горизонтом в определенный момент времени относительно Вашего местоположения. Спутники GPS, расположенные на низкой высоте, находятся близко к горизонту и с большей вероятностью будут заслонены близлежащими зданиями или холмами, что затруднит Вашему GPS-приемнику сделать захват. Маска возвышения GPS позволяет подсчитать, сколько спутников на самом деле видно из Вашего местоположения, исключив все спутники, чьи отметки ниже порогового значения.
Обратите внимание, что фактическое количество видимых спутников может меняться во время Вашего полета. Например, даже если инструмент предсказывает только 9 спутников, Вы можете увидеть целых 10 или 11, когда находитесь на больших высотах и вдали от близлежащих зданий.
UAVForecast.com использует запатентованную модель для имитации ожидаемого количества спутников GPS, которые Вы сможете захватить, учитывая следующие факторы:
- Количество спутников GPS, видимых в небе (отфильтрованных по маске высот).
- Время суток: ионосферные помехи для GPS ночью уменьшаются.
- Ваша широта и долгота: ионосферные помехи сильнее вблизи экватора.
- Текущий или прогнозируемый Kp-индекс.
Обратите внимание, что вероятность - это прогнозируемая величина, а фактическое число, которое Вы видите, будет варьироваться в зависимости от местных условий, случайных колебаний в ионосфере и т.п.
1) d) Обновление FW плате AGNSS
Обновление AGNSS (MAGNSS) возможно только начиная с прошивок 0.08.08 и выше. Если у вас прошивка ранней версии - необходимо написать в личном сообщении t.me/lidaru
1) Первым делом переходим в наш Telegram канал https://t.me/teodrone и среди файлов ищем последнюю прошивку. В данном случае это 0.08.23 и скачиваем файл, так как потом интернет придется отключить для подключения к коптеру.
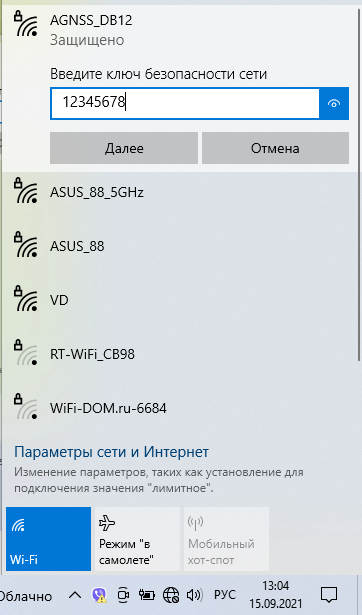
2) Включаем только квадрокоптер (пульт не трогаем), ждем окончания инициализации, после которой должна появиться WIFI сеть с именем AGNSS. Подключаемся к ней с паролем 12345678.
3) открываем в браузере Google Chrome страницу по ip адресу 192.168.0.1. (важно именно в этом браузере, работоспособность в других браузерах не гарантируется)
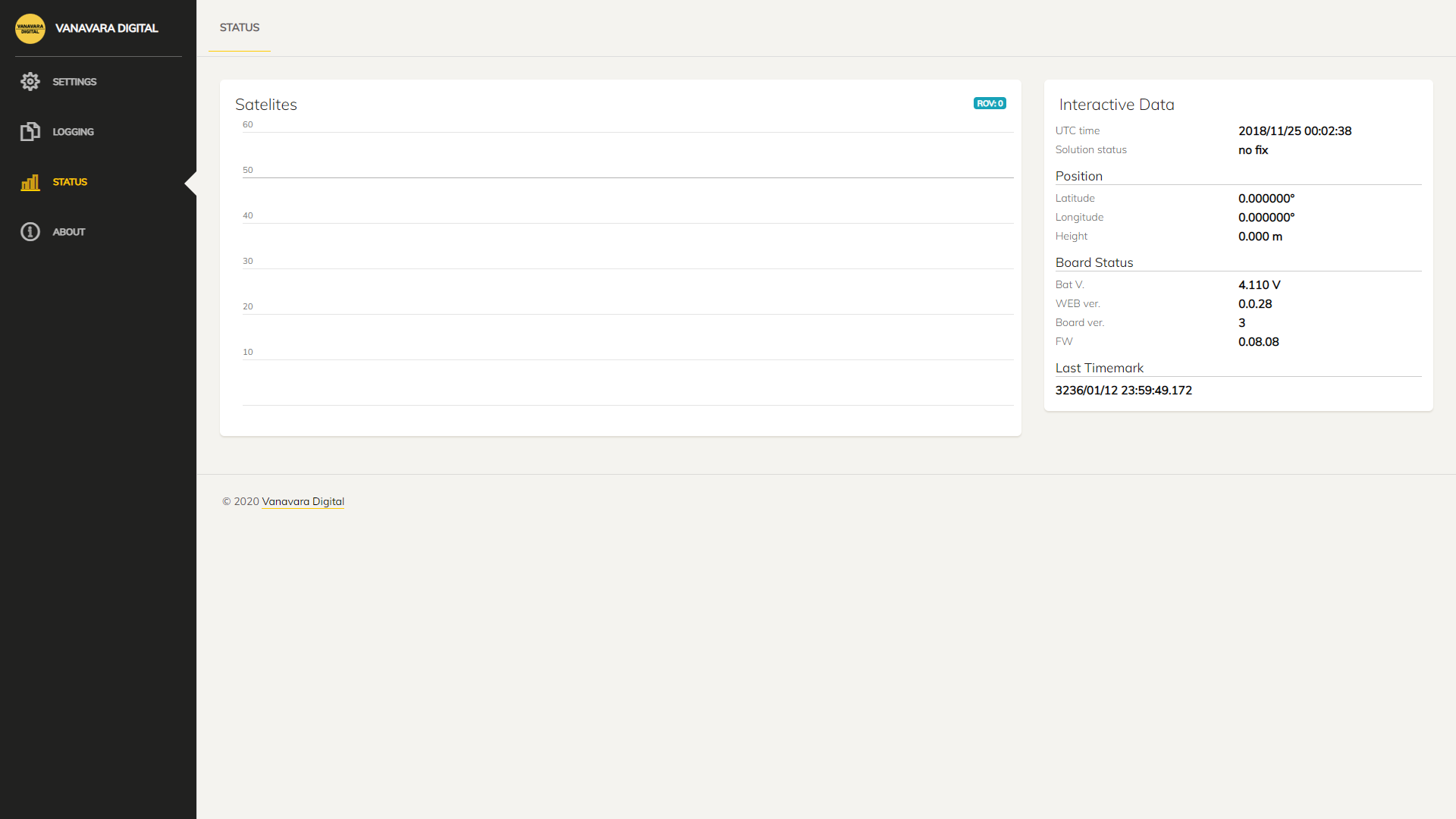
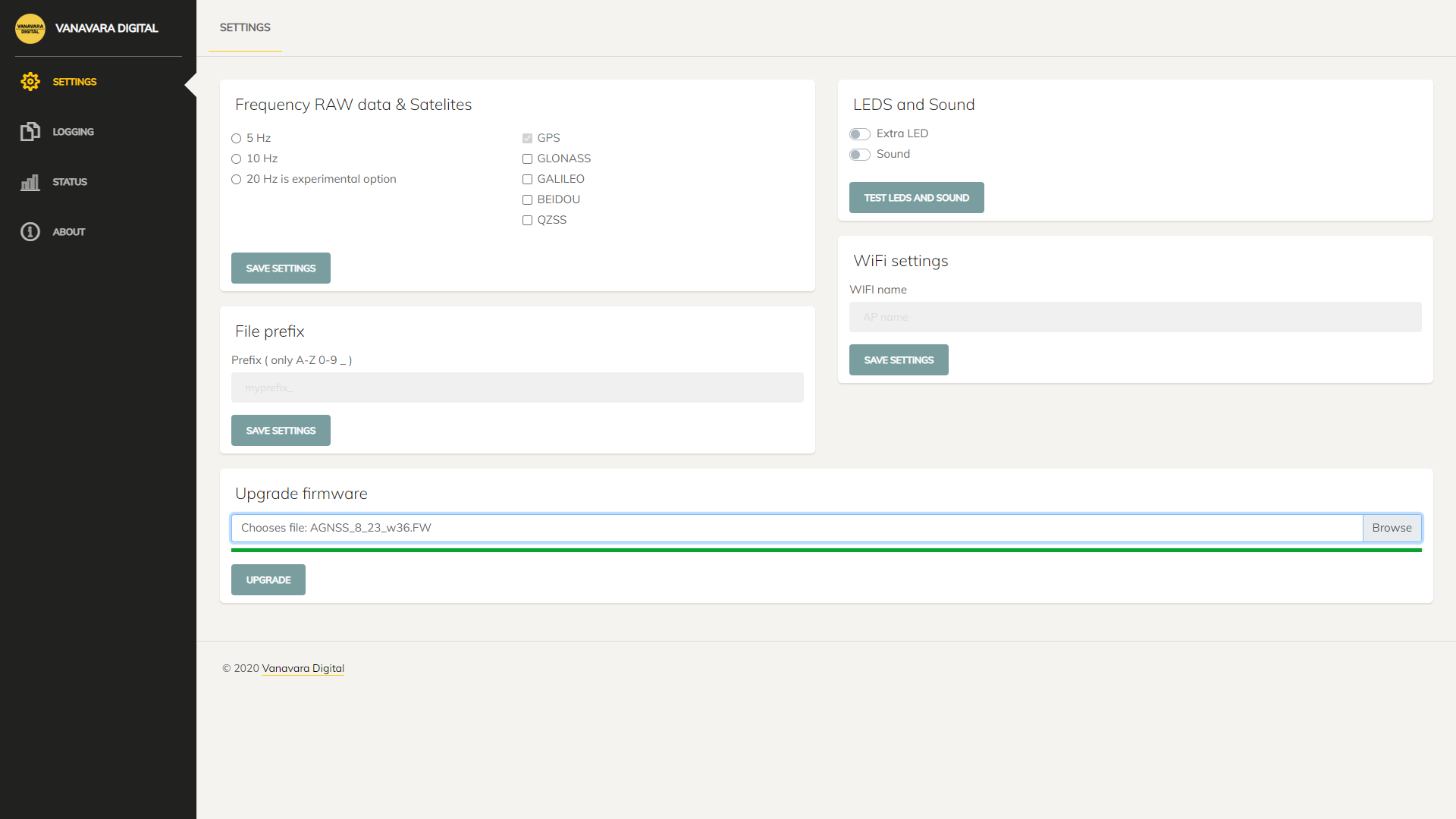
4) в закладке STATUS справа есть информация о текущей прошивке - FW 0.08.08 - проверяем что она не актуальная.
5) Открываем страницу Settings
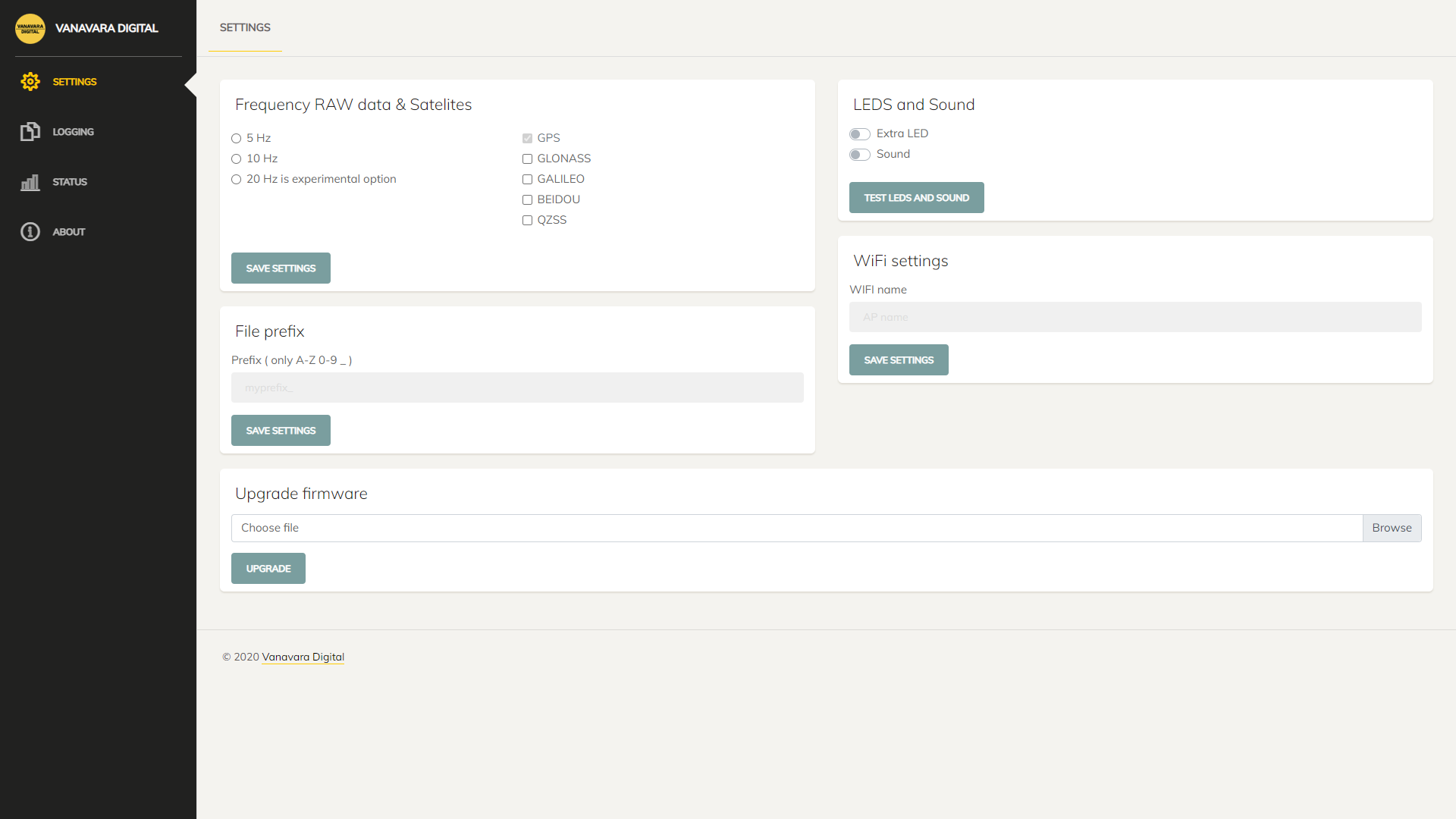
5) В блоке Upgrade firmware жмем кнопку Browse и выбираем скачанный ранее файл, обычно он должен находиться в папке загрузки\telegram desktop и отсортировав по дате - должен быть первым. жмем открыть.

6) Жмём Upgrade ждем. Плата AGNSS обновится, во время обновления плата будет издавать звуковые сигналы.
7) После того, как плата перестанет издавать звуковые сигналы, необходимо отключиться от WIFI и подключиться заново и проверить версию прошивки.
8) если не удается получить доступ к WEB интерфейсу AGNSS по ip 192.168.0.1, то необходимо выполнить обновление через 192.168.0.1/recovery.html
2) Подготовка Базовой станции
Установите ГНСС базовую станцию на репер с известными координатами на открытой местности. Включите на базе запись RAW данных спутниковых измерений с частотой 1 Гц или реже, GPS + Glonass (Galileo - по желанию).
ВАЖНО!!! Полет квадрокоптера должен быть в радиусе 40 км от этой базовой станции.
При расположении базы на открытом участке и при хороших погодных условиях возможно осуществлять работу от базы на удалении до 80 км.
2) a) Использование базовой станции для обеспечения аэрофотосъемочных работ
Базовые станции GNSS необходимы для обеспечения территории измерительной и корректирующей информацией для постпроцессинга и высокоточного позиционирования в режиме реального времени.
Для определения координат центров фотографирования в @Teoboxbot необходимо использовать данные с базовой станции с точными координатами, имеющими привязку к пунктам геодезической сети.
При аэрофотосъемочных работах использовать можно как ПДБС (постоянно действующие базовые станции) так и собственную полевую базу. Но всё же рекомендуется запускать свою базу на объекте или поблизости от него, чтобы избежать ситуации когда есть вероятность не получить данные с ПДБС (отключение базы, ошибка в записи ринекса и прочее).

При установке базы на точке с известными координатами необходимо учитывать высоту не до низа крепления антенны, а высоту до фазового центра антенны, обычно на ГНСС приемниках указывается значение от низа крепления (ARP) до фазового центра L1 и L2, разница между этими значениями невелика и можно взять среднее значение.
Для исключения ошибок определения координат базовой станции используйте не менее 4 пунктов геодезической сети.
Частота записи данных базовым приёмником для АФС должна быть 1 Гц.
Допускается использование ГНСС приемников с частотой записи 10 секунд
3) Подготовка к полету.
-
Снимите фиксатор подвеса с камеры Теодрона. Установите Теодрон на ровную поверхность.
-
Установите пропеллеры на квадрокоптер. Установите ГНСС антенну на квадрокоптер.
-
Вставьте micro SD карту U3 класса в квадрокоптер. Рекомендуется использовать карточку 32 - 64 Гб, класса U3 Sandisk Extreme. Карты 128 Гб могут вызвать зависание камеры на 10-40 секунд во время интервальной съемки.
Внимание: рекомендуется заполнять карту памяти не более, чем 2/3 ее объема.
- Включите квадрокоптер и пульт. Подсоедините планшет к пульту и зайдите в DJI Go 4 для настройки фотокамеры.
- Переключите камеру в режим фото:
- установите переключатель режима камеры в A или Auto.
- iso 100 или 200, если освещенность слабая
- диафрагма 2.8 - 8 - в зависимости от освещенности - важно, чтобы выдержка при этом была не короче 1/1600. Не рекомендуется делать АФС с выдержкой 1/2000 и короче из-за невозможности использования механического затвора на таких коротких выдержках.
- Баланс белого - Sunny или Cloudy.
- Стиль - Landscape
- Color - None или Normal
- Image Size 3:2
- Image Format JPG
- Mechanical Shutter - ВКЛЮЧЕНО
- Фокусировку камеры переводим в режим M и уводим фокус в бесконечность. Наилучший способ сфокусировать камеру - в режиме AFC нужно тапнуть по экрану на дальнем четком объекте(далее 50 метров), затем перевести камеру в MF. Таким образом ваша камера будет сфокусирована на "бесконечность".
ВНИМАНИЕ: Отформатируйте SD карту в квадрокоптере!!!
Приемник AGNSS L2 готов к работе и автоматически включает запись спутниковых измерений через 40 секунд после включения питания Теодрона.
Дождитесь появления 8-10 спутников. Откалибруйте компас. При втором круге вращения, держите коптер камерой вниз, а не на боку.
Установите Теодрон на ровную поверхность. Для этого отлично подходит серый кейс, входящий в комплектацию коптера.
Теодрон готов к полету!
3) a) Маркировка и расстановка опознаков
Опознаки - это точки, которые чётко опознаются на аэрофотоснимках и на местности, координаты которых определены с высокой точностью. Координаты опознаков можно определить различными геодезическими методами, чаще всего это спутниковые наблюдения в режимах RTK, PPK или статика.
Опознаки необходимо использовать для контроля проведённых съемочных работ и для калибровки камеры.
Маркируемые планово-высотные опознаки должны располагаться таким образом, чтобы на аэрофотоснимках их изображения не закрывались изображениями других объектов или их тенями.
Для маркировки, как правило, должны применяться дешевые материалы. Обязательным условием выбора материалов и красящих веществ для опознаков является обеспечение максимального контраста между маркировочным знаком и фоном. В качестве опознаков могут быть использованы читаемые на снимках объекты, такие как люки подземных коммуникаций, стыки тротуарной плитки, дорожная разметка и прочее.

Не стоит использовать в качестве опознаков углы поворотов заборов, отбойники, стоящие высоко от уровня земли столбики малого размера, бордюры. Можно неверно установить маркер при обработке и получить ошибку как по высоте, так и в плане.

Для определения координат опознаков должна использоваться система координат с параметрами проекции, которая будет применяться при фотограмметрической обработке снимков.
3) b) Полевое дешифрирование
Дешифрирование - метод исследования объектов, явлений и процессов на земной поверхности, который заключается в распознавании объектов по их признакам, определении характеристик, установлении взаимосвязей с другими объектами.
Полевое дешифрирование заключается в сопоставлении изображения на снимках с местностью, в результате чего опознаются объекты и определяются их свойства.
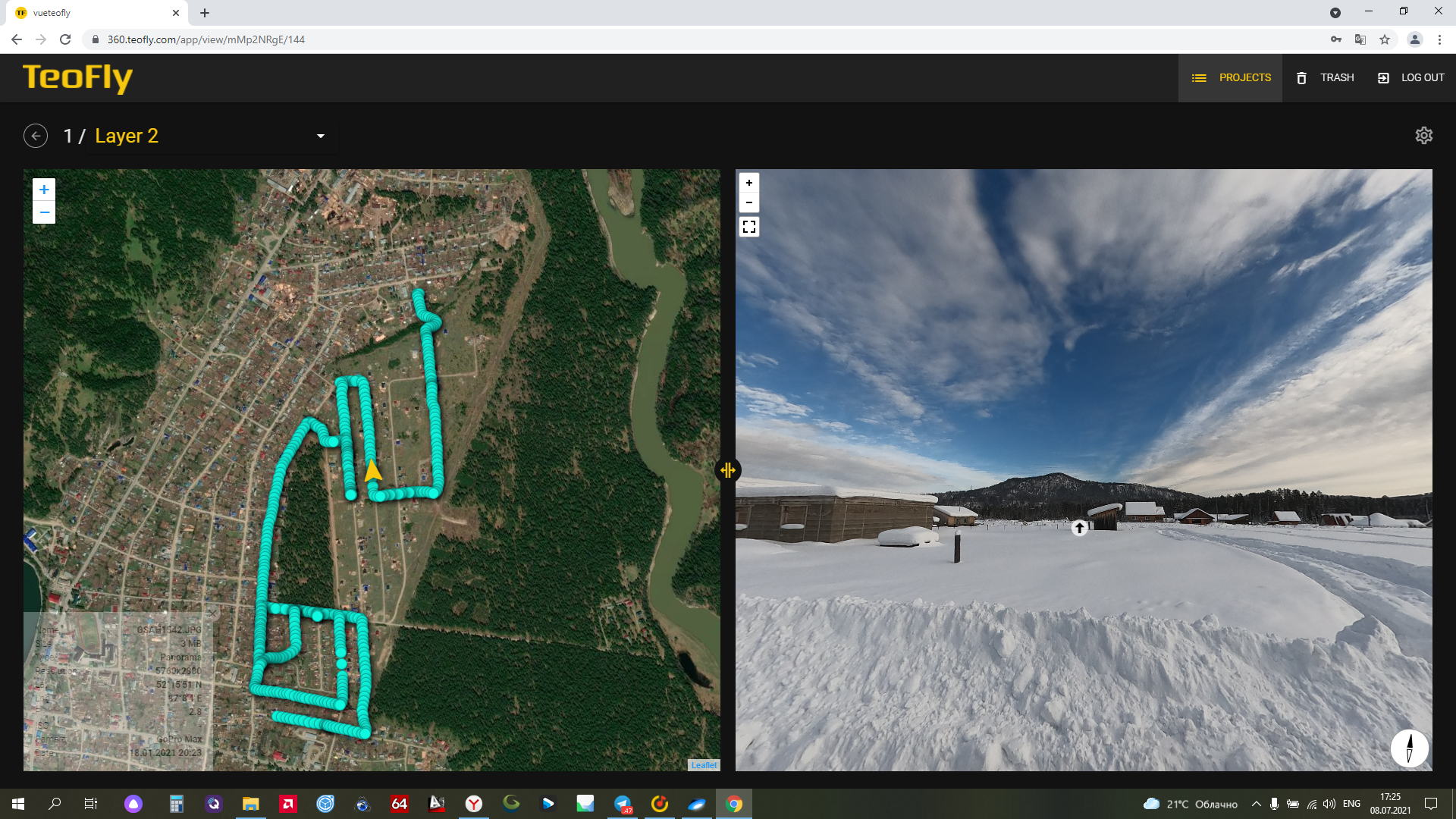
Немаловажную роль при дешифрировании играют обзорные фотоматериалы как с дронов, так и с 360° камер.
Для удобства работ с панорамами и фотоснимками содержащими в себе геопозиции разработан сервис TeoflyPanorama viewer

Один из вариантов крепления камеры на автомобиле.
Сервис разрабатывался с учетом использования камеры GoPro Max, ниже на видео показаны основные настройки камеры для интервальной съемки.
3) c) Cfixer - размагничивание компаса.
Любой квадрокоптер использует электронный компас для ориентации в пространстве. Без корректной работы компаса невозможна ориентация в пространстве, а значит и полет на автопилоте.
У квадрокоптеров есть возможность выполнять калибровку компаса, но со временем компас намагничивается (некоторые элементы компаса), и калибровка перестает помогать.
Это можно заметить, когда периодически во время полета появляется ошибка Compass Erorr, во время которой коптер переходит в режим ATTI. Так же во время ошибка компаса сбрасывается полет по маршруту, и если коптер летел по маршруту и внезапно остановился - одна из причин - ошибка компаса (а так же работа датчиков препятствий, глушилка GPS).
Для снятия намагниченности и был разработан Cfixer (Compass Fixer).
Питание Cfixer осуществляется от аккумулятора коптера, от автомобильного зарядного или от сети 220V (штатным блоком зарядного от Phantom 3 и 4 версии или через специальный провод переходник для конкретной модели квадрокоптера, покупается отдельно).
Подключив Cfixer от аккумулятора, необходимо включить аккумулятор, а после размагничивания не забыть его выключить.
Как выполнить размагничивание компасов у Teodrone:
Phantom 4 adv\proV1
У этих моделей квадрокоптеров компас находится в передних ногах, как показано на картинке.

Для размагничивания необходимо приложить Cfixer к крышке компаса и нажать кнопку. Полсе звукового сигнала Cfixer можно убрать.
Phantom 4 ProV2
У Phantom 4proV2 Компас расположен в передней левой и задней правой стойке, так же за лючком.

После размагничивания не забудьте выключить аккумулятор.
Размагничивать не надо перед каждым вылетом. Самое лучшее - после приезда на объект, выполнить размагничивание 1 раз и спокойно летать.
Так же рекомендуем потренироваться летать в режиме ATTI, так как при ошибке компаса или глушилке GPS сигнала коптер переходит именно в этот режим и доступно только управление с пульта, а коптер поддерживает горизонтальное положение и барометрическую высоту.
Лететь необходимо ориентируясь на картинку с камеры, либо на местоположение коптера на карте.
4) Выполнение съемки
Выполните полет по маршруту в том ПО, которым вы привыкли пользоваться. Независимо от полетного программного обеспечения, плата синхронизации AShot отследит момент фотографирования и строго в середине выдержки передаст сигнал о фотособытии в ГНСС плату AGNSS L2.
Если полетное ПО позволяет осуществлять полет по маршруту без фотографирования (например ПО Litchi), то вы можете активировать плату AShot для автоматического фотографирования с интервалами съемки 1 кадр в 1.3 или
1.8 секунды с гарантией выполнения фотоснимка (отсутствуют пропуски фотографий) - опция доступна только для платы AShot версии Ph4 adv/pro/v2. Для этого необходимо настроить опускание/поднятие камеры на кнопку C1 или C2. По настройке этих кнопок смотрите инструкцию к тому ПО, в котором вы планируете их использовать.
Чтобы активировать AShot на интервальную съемку, вам необходимо:
При опущенной вниз камере кнопкой С1 или С2 поднимите камеру вверх и сразу опустите вниз - AShot активируется на интервал в 1.3 секунды. Для активации на интервал в 1.8 секунды, вам необходимо при опущенной вниз камере кнопкой С1 или С2 поднять камеру вверх, подождать 1.5-2 секунды и опустить камеру вниз.
Для выключения интервальной съемки с помощью AShot, необходимо при опущенной вниз камере кнопкой С1 или С2 поднять камеру вверх и кнопкой С1 или С2 опустить ее вниз. AShot остановит интервальную съемку
Если требуется выполнить несколько вылетов, то посадите Теодрон, замените АКБ и взлетайте снова.
ГНСС плата AGNSS L2 создаст на каждый полет свой отдельный файл UBX данных.
По завершению полетов необходимо выключить Теодрон, выключить радиомаяк и затем выключить базовую станцию.
5) Скачивание данных с платы AGNSS L2
Включите Теодрон, не включайте пульт.
В ноутбуке или мобильном устройстве в разделе Wi-Fi подключитесь к сети AGNSS_XXXX с паролем 12345678.
В браузере наберите http://192.168.0.1 и вы попадете в веб интерфейс платы AGNSS.
Скачивание данных.
В разделе Logging вы обнаружите список созданных UBX файлов. Каждый файл это каждое включение Теодрона.
Справа от имени файла вы найдете кнопку для скачивания. Жмите ее. После скачивания данных необходимо выключить Теодрон.
Обработка данных.
Для выполения PPK расчетов, воспользуйтесь профессиональным надежным решением - облачная обработка данных от компании Теодрон - телеграм бот @TeoboxBot
5а) Проверка качества GNSS данных в RTKPLOT.
Процент фиксированного решения зависит от многих факторов, таких как:
-качество гнсс данных;
- количество общих спутников у базы и ровера;
- расположения спутников на небосводе;
- расстояния до базы;
- частота записи данные у базы и у ровера;
- общее время работы базы и ровера;
- время от включения базы и ровера до первого снимка.
Для того, с чтоб оценить качество GNSS данных, необходимо RINEX файл открыть в приложении RTKPLOT.
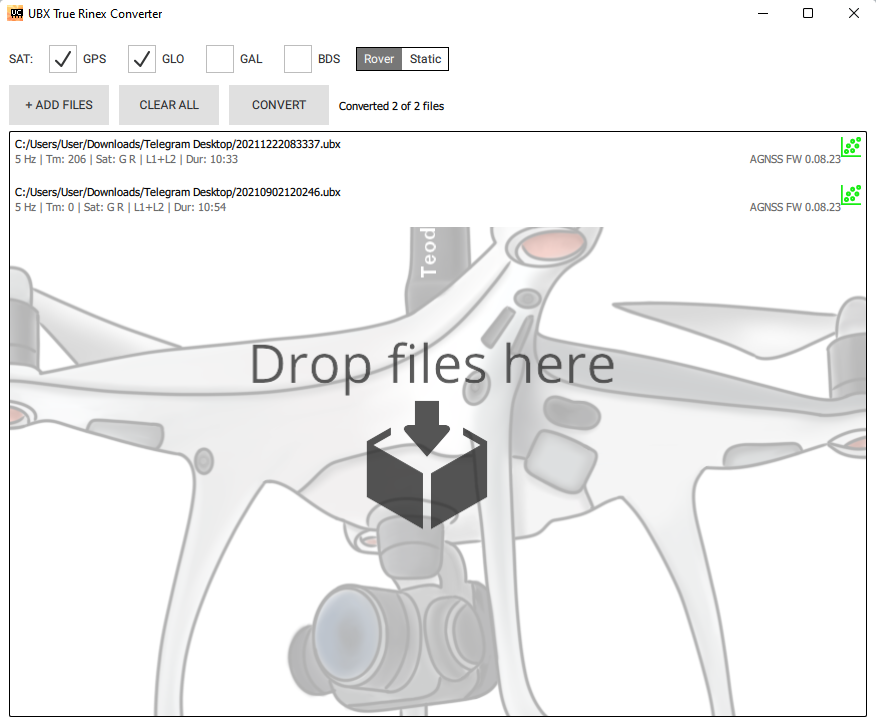
Пользователям квадрокоптеров Teodrone достаточно загрузить нужный UBX файл в UBX Converter, при условии что во время полёта прошивка платы AGNSS была не старше версии 0.8.23. (Скачать конвертер - https://t.me/teodrone/384)
После добавления нужного файла (или нескольких файлов), необходимо нажать кнопку CONVERT, после чего появится кнопка открытия файла в RTKPLOT - ![]()
В случае если у вас была старая прошивка, ее обязательно необходимо обновить (смотри страницу о обновлению платы AGNSS - https://wiki.teofly.com/books/teodrone-instruktsiya-po-ekspluatatsii-gnss-kvadrokoptera-teodron/page/1-d-obnovlenie-fw-plate-agnss), а для конвертации необходимо использовать RTKCONV (рекомендуем скачать по ссылке https://t.me/TeokitEN/9606 с проверенными настройками).
В RTKCONV добавляем нужный файл и проверить, чтоб был выбран формат u-blox и жмём кнопку conv, после чего файлы OBS и NAV появятся в той же папке, где лежит UBX файл.
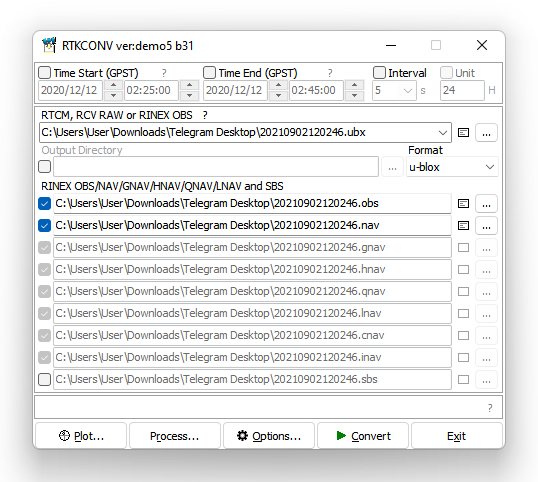
Дальше необходимо нажать кнопку PLOT, для открытия этого файла в RTKPLOT.
Первым делом смотрим SNR сигнала по частотам L1 и L2.
В хороших условиях сигнал SNR ровный, от 35 до 52 (крайние спутники, которые в районе горизонта будут ниже 35, но они и не идут в расчёт).
Так же открываем SAT VIS -видимость спутника и анализируем количество видимых спутников, наличия потери фазы.
Как выглядит глушилка:
Глушилки бывают разные, есть глушилки, которыми пользуются водители фур, чтобы избежать плату за Платон, бывают стационарные глушилки, которые работают постоянно, либо включаются при обнаружении радиосигнала квадрокоптера.
Глушилка в первую очередь понижает SNR сигнал.
Смотрим в какой момент есть понижение сигнала и сопоставляем с траекторией полёта, а также с положением фиксированных/плавающих решений (в этом поможет kml файл который выдаёт бот, по запросу /kml после обработки файлов).
Автомобильная глушилка фур часто проявляется в районе автостоянок, где отдыхают водители, а так же периодически вдоль трассы, но зависит от траектории полёта квадрокоптера. Если коптер летел поперёк трассы, то глушилка будет волнообразной, по мере приближения и удаления фуры.
Если коптер летел вдоль трассы, то возможно такое же волнообразное поведение если фура ехала на встречу, либо более долгое, если фура ехала в одном направлении с коптером.
Воздействие этих глушилок до 150м очень сильно влияет на фиксированное решение, а так же на полёт коптера по маршруту. До 400м заметно возврате глушилки, но проект по маршруту и обработка данных уже заметно стабильны.
Стационарные глушилки немного сильнее автомобильных, и обычно включаются автоматически при появлении радиосигналов с квадрокоптера. Обычно они установлены около военных объектов, заводов, важных социальных и инфраструктурных объектов, мусорных свалок и т.п.
Обычно в этих местах квадрокоптер теряет GPS сигнал и переходить в решим ATTI, либо количество спутников м минимально, если коптер летел с краю действия глушилки.
Еще одна причина отсутствия фиксированного решения - потеря фазы спутникового сигнала.
Обычно это происходит по какой то механической причине. В большинстве известных нам случаев - из за сильного потока воздуха направленного на ГНСС плату. После восстановления фазы, еще примерно минуту данные могут не иметь фиксированного решения.
6) Метки не равны фоткам
Возможна ситуация, при которой после залёта и начала обработки данных вы обнаруживаете, что количество временных меток не совпадает с количеством фотографий. Причин возникновения подобной ситуации может быть несколько, например, вы сделали фото до того, как прикрутили ГНСС антенну к дрону, или банально удалили фото до начала обработки. Также, возможно вы используете некачественную micro CD карту памяти. Возникает задача найти, где конкретно началось несовпадение и исправить ситуацию. По проблемному полёту загрузите в Metashape все не изменённые фото (т.е те, что сформировались на micro CD карте (с навигационными центрами)), поменяйте проекцию на нужную вам, затем загрузите все метки времени в виде текстового файла. Для удобства, сделайте копию каталога фотографий с проблемным полётом, пакетно переименуйте в программе Total Commander фотографии в этом каталоге так, чтобы имена фотографий начинались DJİ_0001.JPG (если это не первый полёт после форматирования micro CD карты памяти). Метки времени загрузите из TeoBoxPPK BOT (там нумерация меток по любому полёту всегда идёт с единицы). После загрузки всех данных в Metashape не меняйте ракурс, а если уже поменяли, то сбросьте ракурс на исходный. Работая только скролом мышки (приближение - отдаление и передвижение всей картинки (через зажатие скрола)) пробегитесь вдоль галсов, сравнивая имена фотографий и имена меток. В случае, когда проекция, в которой получены метки времени (т.е. *.prj файл, который вы грузите в PPK BOT) совпадает с файлом проекции, который вы выбираете в Мetashape, найти пропуск (а чаще всего это будет пропуск фотографии) не составит особого труда, т.к. позиции фотографий будут рядом с позициями меток времени (примерно в 3-12 метрах друг от друга). Вы оперативно обнаружите, в каком месте не хватает фотографии (или метки времени) и удалите лишнюю метку или фотографию для дальнейшей корректной обработки материала в программе Teobox 3.
7) Обработка ГНСС данных в @TeoboxBot
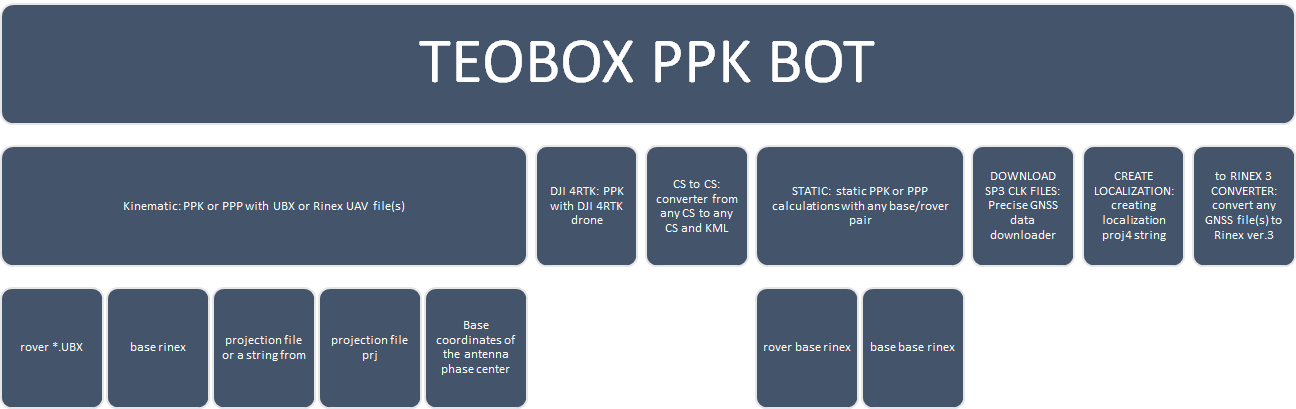
@TeoboxBot - бот для удалённой обработки PPK.
Предназначен для:
- online обработки данных с БПЛА;
- обсчета статики;
- конвертации координат из одной системы координат в другую;
- скачивания SP3 файлов;
- создания файла локализации по 4 точкам с координатами известными в WGS84 и в целевой МСК через известную СК либо через UTM.
- Конвертация GNSS файлов в RINEX 3
Помогает координаты центров фотографа в любой системе координат - для этого нужно загрузить в UBX-файлы с расчетным количеством), UBX или Rinex с описанием включаемой проекции или проекции в ботах @GeobridgeBot и @FindPrjBot - на выходе вы получаете вы получаете координаты меток в виде текстового файла.
Помимо обработки PPK, можно конвертировать координаты точек в необходимые системы координат, создать локализацию по 4 точкам, произвести конвертацию данных GNSS в Rinex.
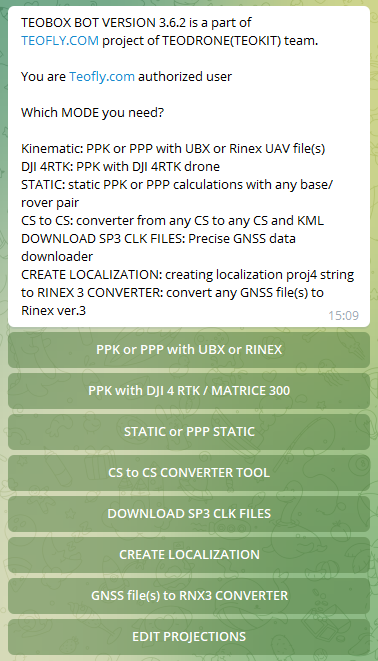
Для обработки данных с БПЛА необходимо начать сессию в боте введя /PPK и отправив ему сообщение.
в ответ Бот покажет меню для выбора режимов обработки.
Для обработки спутниковых данных с квадрокоптера Teodrone необходимо нажать первую кнопку
PPK or PPP with UBX or RINEX.
1)Появившееся сообщение "Send me UBX or RINEX file(s) from Drone or Rover", что означает что боту необходимо отправить до 20 файлов с квадрокоптера и дождаться их полной загрузки.
Очень важно дождаться полной загрузки файла, так как бот его увидит ТОЛЬКО после загрузи, и если нажать "Continue", то файл с коптера попадет боту как файл с базы и не посчитается.
2) После загрузки всех файлов с коптера, необходимо нажать "Continue", тем самым подтвердить что все файлы с Квадрокоптера загружены. Бот перейдет к этапу загрузки файлов с базовой станции. Ниже перечислены поддерживаемые бинарные файлы с ГНСС приемников, которые можно отправлять без конвертации в RINEX
Send me base file(s) or click /PPP if you need ppp session ppk
Supported formats for base files:
UBX - from Emlid Reach or VD AGNSS
DAT - from DJI D-RTK2
T02 - from Trimble GNSS (not stable)
JPS - from Javad GNSS
HCN or HCR - from PrinCE GNSS
TPS - from Topcon GNSS
BIN - from Hemisphere Eclipse/Crescent
M00 - from Leica
RNX or OBS or 20O / 21O
20D or 21D - Compact RNX"
После отправки файлов, бот уточняет, все ли файлы загружены. При необходимости можно отправить дополнительные файлы базы.
Важно: Файлы базовой станции должны относиться к одной базе, которая стояла на одной и той же точке на всем протяжении работы.
Не допускается загрузка файлов разных базовых станций (перемещение приемника во время работы приравнивается к использованию другой базовой станции).
Send me more base file(s), I will merge them myself
or click Continue
После завершения загрузки всех файлов, необходимо нажать "Continue"
3) Загрузка файла проекции, либо текстовой строки с проекцией.
Send me a projection file or a string from
@FindprjBot or @GeobridgeBotor click /WGS84 if your projection is WGS84 Lat/Lon
Для выбора системы координат возможно использовать двух ботов, указанных в сообщении от бота (@FindprjBot or @GeobridgeBot), для этого достаточно написать их имя и как минимум 3 символа из наименования нужной системы координат.
ВАЖНО!!! Файлы проекции из открытых источников и не гарантируют точность. Правильно - в поле выполнить локализацию по 5 пунктам ГГС и сформировать свой файл проекции.
По мимо ботов, возможно отправить текст с описанием файла проекции, к примеру МСК-167 для Красноярского края выглядит примерно так:
PROJCS["MSK МСК-167 Красноярский кр., Норильск, Хакасия, Тува, Тыва",GEOGCS["Krassovsky, 1942",DATUM["unknown",SPHEROID["krass",6378245,298.3],TOWGS84[23.57,-140.95,-79.8,0,0.35,0.79,-0.22]],PRIMEM["Greenwich",0],UNIT["degree",0.0174532925199433]],PROJECTION["Transverse_Mercator"],PARAMETER["latitude_of_origin",0],PARAMETER["central_meridian",93],PARAMETER["scale_factor",1],PARAMETER["false_easting", 106797.80],PARAMETER["false_northing",-5578022.50],UNIT["Meter",1]]
Либо *.TXT файл, содержащий такой же текст.
Так же возможно нажать на текст "/WGS84" и Обработать данные в СК WGS84.
4) Введите координаты базовой станции.
Write me Base coordinates of the antenna phase center:
North East Height
For example: 636008.620 90989.042 221.668
Необходимо указать координат координату базы в той системе координат, которую указали в предыдущем этапе.
В случае если координаты не правильные бот предупредит об этом в тексте во время обработки.
ВАЖНО!!! Координаты указываеются в порядке СЕВЕР - ВОСТОК - ВЫСОТА. Разделитель дробной части - точка. Допустимый разделитель координат - пробел, запятая, новая строка.
Координата высоты, указываемой в боте должна соответствовать фазовому центру приемника. Бот НЕ(!!!) читает данные из шапки файлов RINEX.
Допустимо указать высоту отметки репера через знак "+" указать вертикальную высоту до фазового центра приемника. Бот сам сложит 2 числа (пример: 222.123+1.512)
5)
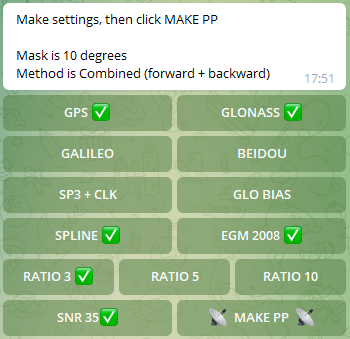
Укажите желаемые настройки и нажмите кнопку "Make PP"
По умолчанию и неизменяемые настройки:
- маска возвышения стоит 10 градусов;
- Метод вычисления комбинированный (Вперед и назад);
- SNR 35 (фильтр по уровню Сигнал/ Шум на 35 dB/Hz);
функционал кнопок:
GPS, GLONASS, GALILEO, BEIDOU - Выбор спутниковых группировок для обработки в боте. Рекомендуемые комбинации
GPS+GLONASS
GPS+GALILEO
GPS+GLONASS+GALILEO
GPS+BEIDOU
SP3+CLK - Загрузка точных эффемерид со спутников NASA на случай плохих GNSS данных из за глушилок.
GLO BIAS - Включение\отключение расчета невязки по GLONASS для оборудования. В случае большого процента плавающего решения, рекомендуется попробовать отключить данный параметр, либо наоборот включить.
SPLINE - Учет кривизны траектории коптера по СПЛАЙНу, уточняет координаты на повороте до 7см.
EGM 2008 - Учет геойда
Ratio - критерий принятия или не принятия результата значений решения уравнения неоднозначности.
Про простому, этот параметр надо использовать так:
Ratio 5 - считает нормально большинство проектов с базой до 30 км. Если база 30+ км, то включаем Ratio 3.
Ratio 10 - используется, если в обработке 18+ спутников и база до 15 км. Тогда обаработка с Ratio 3 и 5 будет невозможна из за избыточности данных.
Жмем кнопку:
Первое сообщение от бота:
Converting file(s):
201910230826.UBX... Done.
---
GPS GLO | L1+L2 | 5 Hz - Показывает выбранные группировки спутников, частоты L1 и L2 и количество герц записи данных
Rinex header info:
WGS84:
56.04807687 92.74582512 263.616
ECEF:
-171048.466 3566451.203 5267652.398
Timemarks: 333 - Количество таймметок в файле
---
Link for downloading Rinex v.3 file:
https://tmp.teofly.com/8fy4Rpx1/201910230826.UBX.obs - Ссылка для скачивания RINEX файлаAShot board detected. - Означает что бот зафиксировал использование платы ASHOT при формировании меток. Это дает преимущество при обработке
Good choice!Downloading NAV files...
Downloaded 3 file(s)
Done.
Второе сообщение бота:
PPK started...
GNSS systems: G RBase coordinates:
445977.1070 2515513.6211 137.0056
---
20211026072032.ubx
---
Base line: 0.0 km - расчетное расстояние до базы (может быть не верным, берется из RINEX)
Mask: 10 deg
Sys: G R
Options: spline egm2008 snr combined ratio03 - Выбранные функции
Calculating... Done.
Work time is: 35 secCalculating spline offsets... Done. - расчет точек по SPLINE
0 points were modified
0 points were ignored
Max difference is 0.000 metersChecking for solution... Done.
Timemarks: 333 - Количество меток в файле
First fix after 00:00
Solution status:
Fix: 100.0% - процент фиксированного решения.
Float: 0.0% - процент плавающего решения.
Apply projection... Done. - применение проекции
Use /KML_0 for stats - нажать для формирования KML файла меток для этого файла
Третьим сообщением бот присылает файл меток и краткое описание (Название, количество меток, процент фиксированного решения).
Последнее сообщение:
Try with another settings:
/REPEAT - Нажать для изменения настроекTry with new PRJ and BASE coordinates:
/EXTRA_REPEAT - нажать для выбора другой системы координат и ввода координат базыFor all kinematic results try:
/KINEMATIC - формирует TXT файл с полной траекторией полета коптераFor KML stats try this:
/KML_ALL - формирует общий KML файл для всех меток из всех обработанных файлов.For timemarks analyze try:
/TM_INFO - информация по таймметкамStart new session:
/PPK - начать новую сессию обработки в боте.Add prj to userdata:
/ADD_PRJ - добавить проекцию в избранноеBot release note:
/RELEASE_NOTES - Сообщение о версиях бота.Donate me:
https://yoomoney.ru/to/410015184390283 - ссылка на донат (чаевые за использование бота и на его дальнейшее развитие)
Если вы увидите сообщение:
Preparing base file(s):
24kr3600.19o... Done.Rover timeline:
2019 10 23 08:27:15
2019 10 23 08:39:44Base timeline:
2019 12 26 00:00:01
2019 12 26 07:00:00Failed.
Check your base file. Exit
Оно означает, что время работы базовой станции и ровера не соответствуют друг другу. Загрузите другой файл базы.
8) ПО Teobox 2.4.10
Программа Teobox предназначена для:
- определения смещения фазового центра антенны относительно центра камеры для каждого снимка индивидуально;
- подтверждения равенства количества фотографий и координат и их сопоставления друг другу;
- присвоение уникальных имен снимков, для исключения повторения имен в проекте;
- фильтрации снимков и исключения лишних фотографий из проекта.
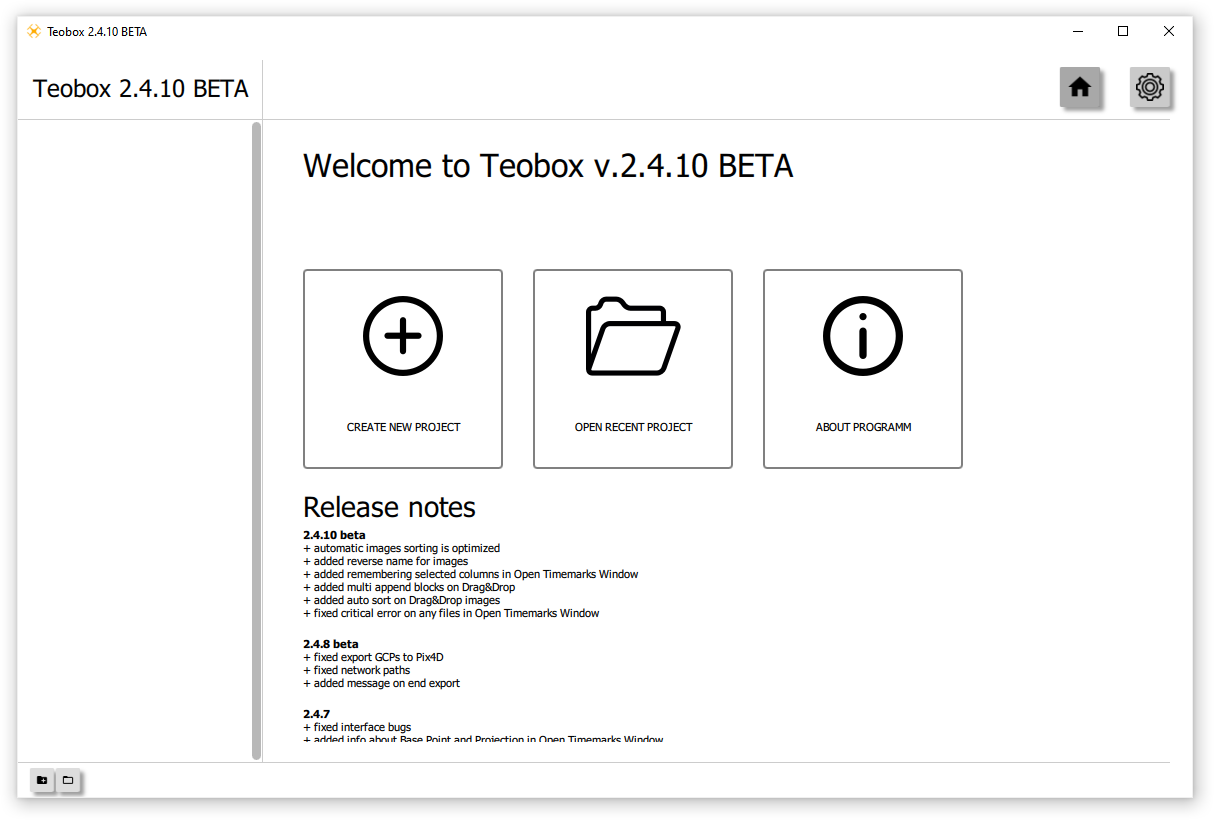
1. Создание нового проекта (Create new project)
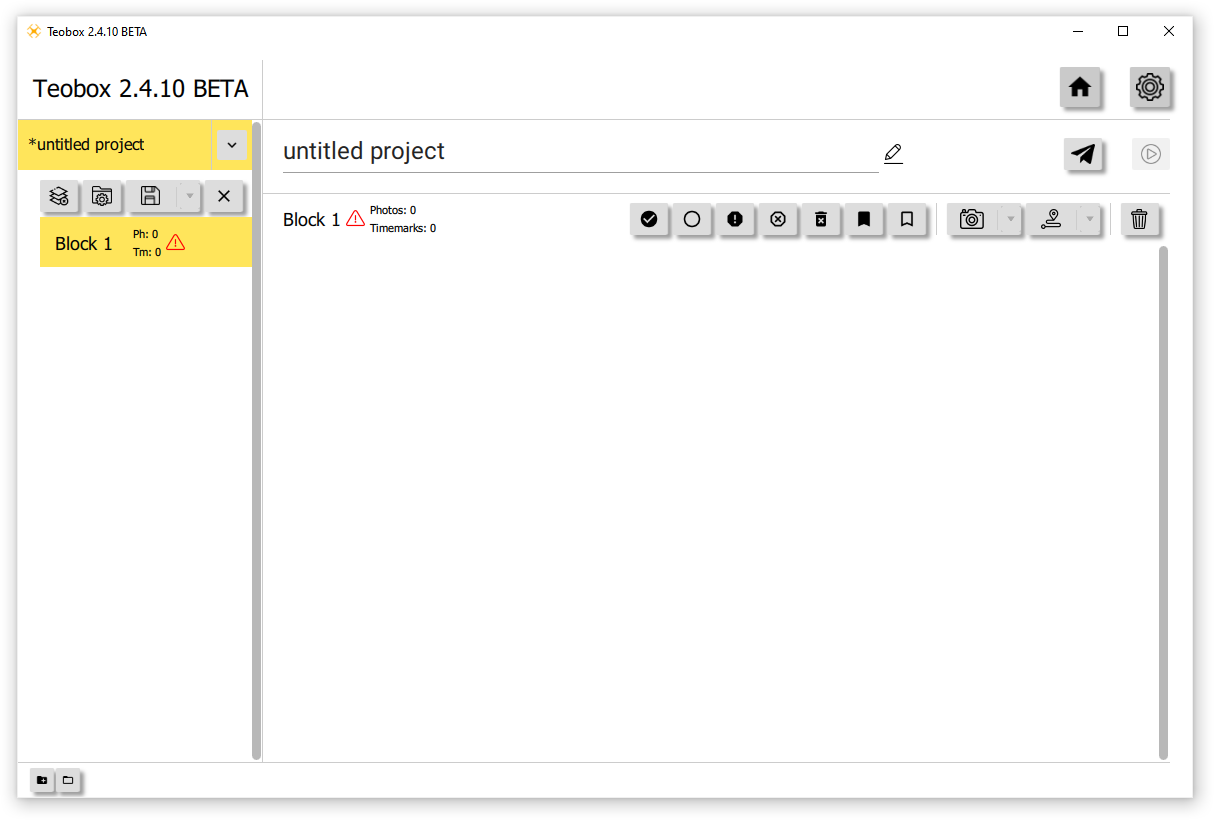
Левая часть окна представляет собой дерево проекта, где надпись untitled project - название проекта, которое можно изменить в правой части окна или в настройках проекта.
 - кнопка создания нового блока;
- кнопка создания нового блока;
 - открытие свойств проекта (Изменение системы координаты, названия, указание своей системы координат и пр);
- открытие свойств проекта (Изменение системы координаты, названия, указание своей системы координат и пр);
 - кнопка сохранения проекта;
- кнопка сохранения проекта;
 - закрытие\удаление блока.
- закрытие\удаление блока.
 - Номер блока, Ph - количество фотографий и Tm - координат. Восклицательный знак означает наличие проблемы.
- Номер блока, Ph - количество фотографий и Tm - координат. Восклицательный знак означает наличие проблемы.
Рекомендуется добавлять каждый вылет в отдельный блок, это позволит разбивать вылеты на отдельные папки, визуально разделять отдельные вылеты, и в случае каких то проблем - значительно облегчает поиск проблемы.
 - кнопки создания нового проекта и открытия старого проекта.
- кнопки создания нового проекта и открытия старого проекта.
Новый проект добавиться к уже имеющемуся проекту, таким образом в одном рабочем окне можно работать с несколькими проектами одновременно, и в каждом проекте может быть нужное количество блоков.
Пример: за 1 день было снято несколько объектов по несколько вылетов каждый.
В окне TEOBOX создаем нужное количество проектов, в которых создаем нужное количество блоков, равное количеству вылетов в конкретном объекте и поочередно добавляем фотографии и координаты.
2) Добавление данных
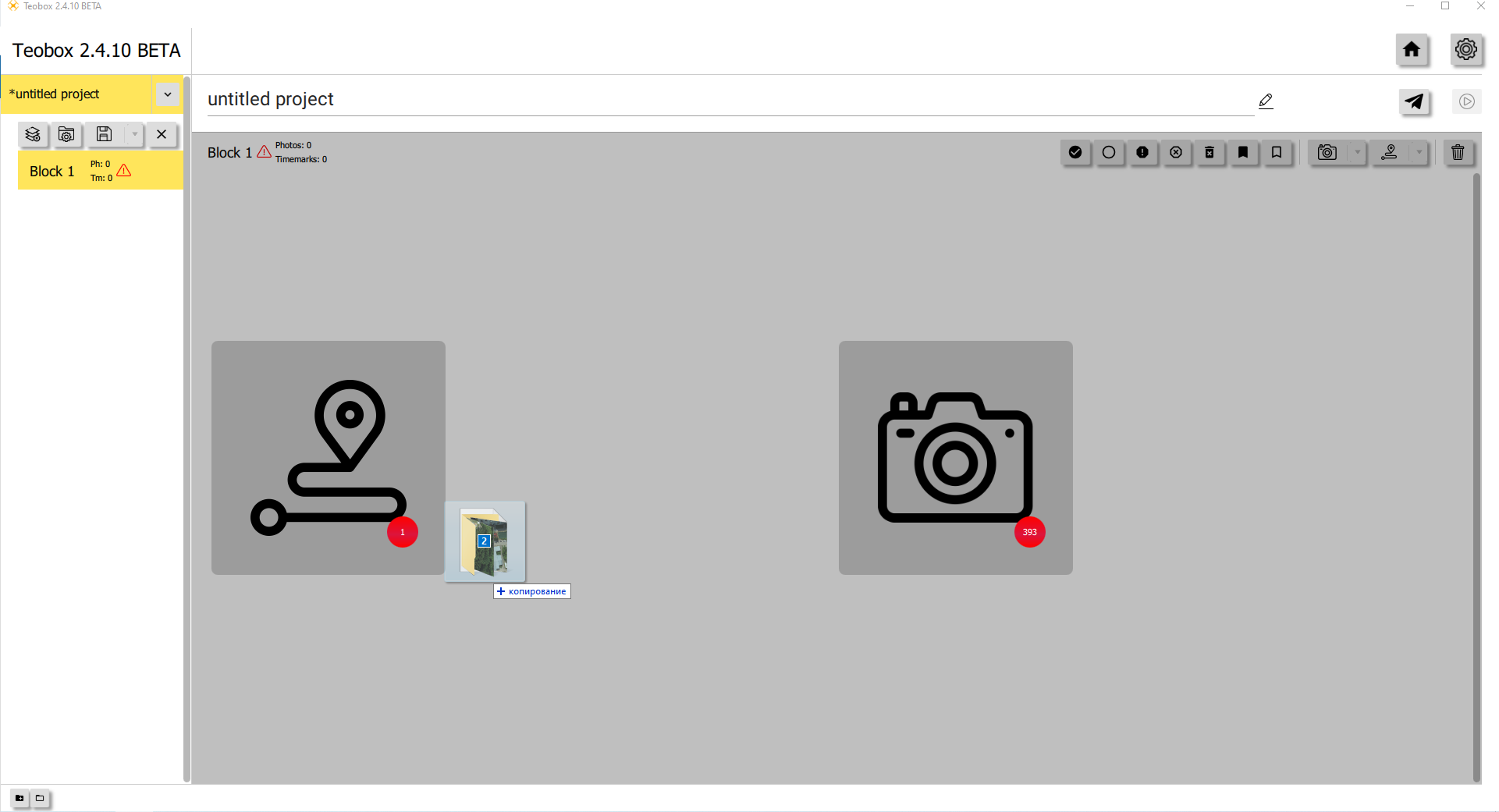
Для добавление фотографий в активный блок, достаточно выделить все нужные фотографии в папке и перетянуть их в рабочую область блока. Она подсветится серым цветом и покажет какие данные видит программа.
На скриншоте ниже показано, что программа видит 1 файл с координатами и 393 фотографии (в данном случае было выделен файл с координатами и папка в которой содержатся фотографии).
Допустимо добавлять фотографии в несколько итераций, в случае если начало полета попало в одну папку, а окончание полета в другу. Необходимо сначала добавить фотографии из первой папки, а потом из второй (они добавятся после первых фотографий).
Добавление координат только из одного файла. при попытке добавить второй файл - первые координаты будут заменены координатами из второго файла.
При необходимости добавить все вылеты в один блок, необходимо в текстовом редакторе объединить файлы с координатами, либо воспользоваться файлом total.txt из Telegram-бота.
Файл с координатами, который получается в результате обработки в Telegram-боте t.me/teoboxbot распознается автоматически и сразу определяются нужные столбцы, а так же определяется строка проекции и координата базовой станции.
При добавлении файла из других программ, необходимо вручную указать нужные столбцы (минимум North, East, H)
Внизу слева можно выбрать нужную систему координат: UTM - это все координаты измеряемые в метрах. Geographic - это все координаты измеряемые в градусах (Широта, Долгота).
Примечание!!!
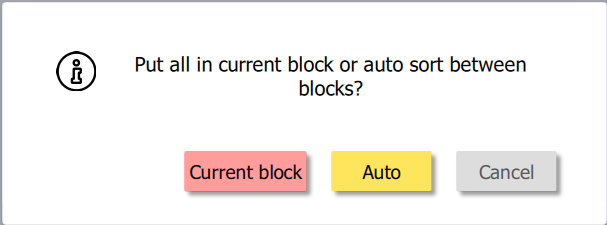
если добавлять фотографии отдельно и с неправильной сортировкой, либо выделить фотографии, но потянуть их не за первую фотографию а за случайную, то Teobox определит неправильную сортировку и выдаст предупреждение об этом.
Нажав Current block - фотографии добавятся "как есть". Нажав Auto - выполнится автоматическая сортировка от первой к последней. Cancel - отмена операции.
Нажав кнопку ОК в окне добавления координат, TEOBOX добавит их к фотографиям - первая координата к первой фотографии.
ВАЖНО!!!! Количество фотографий и координат в блоке должно быть равно друг другу.
В случае расхождения количества координат и фотографий, необходимо правильно определить причину и удалить именно лишние метки, а не любые случайные, с целью чтоб количество совпало. Если удалить не те данные, которые нужно, то можно получить ошибку в несколько десятков метров.
Интерфейс рабочей области

Вверху справа кнопка ![]() главного экрана и кнопка
главного экрана и кнопка ![]() общих настроек программы (обзор настроек см. ниже).
общих настроек программы (обзор настроек см. ниже).
Ниже идет поле названия проекта, там где надпись untitled project, которую можно поменять.
Кнопка![]() открывает окно с планом полета, на котором можно отобразить исходные координаты фотографий и координаты меток. Подробнее рассмотрим ниже.
открывает окно с планом полета, на котором можно отобразить исходные координаты фотографий и координаты меток. Подробнее рассмотрим ниже.
Кнопка  Run project - запуск обработки проекта.
Run project - запуск обработки проекта.
 - дублирование информации из дерева проекта, с именем блока и количеством фотографий и координат.
- дублирование информации из дерева проекта, с именем блока и количеством фотографий и координат.
 - выделить всё
- выделить всё
 - снять выделение со всего
- снять выделение со всего
 - отменить отправку фотографии в карантин
- отменить отправку фотографии в карантин
 - отправить фотографию в карантин. Это самый правильный вариант работы с лишними данными. фотографии будут обработаны, переименованы согласно порядку и помещены в отдельную папку. При необходимости, эти фотографии можно будет добавить в обработку без каких либо сложностей.
- отправить фотографию в карантин. Это самый правильный вариант работы с лишними данными. фотографии будут обработаны, переименованы согласно порядку и помещены в отдельную папку. При необходимости, эти фотографии можно будет добавить в обработку без каких либо сложностей.
 - удалить выбранное
- удалить выбранное
 - пометить фотографию как опознак. Для тех, кто выполняет измерение опознака с помощью квадрокоптера. Выделив нужные фотографии, отмечаем их как опознаки. Эти координаты будут добавлены как опознаки в проект Metashape или Pix4D
- пометить фотографию как опознак. Для тех, кто выполняет измерение опознака с помощью квадрокоптера. Выделив нужные фотографии, отмечаем их как опознаки. Эти координаты будут добавлены как опознаки в проект Metashape или Pix4D
 - снять метку опознака с фотографии
- снять метку опознака с фотографии
 - кнопка добавления фотографий через окно выбора файлов. В всплывающем меню можно удалить все фотографии из блока.
- кнопка добавления фотографий через окно выбора файлов. В всплывающем меню можно удалить все фотографии из блока.
 - кнопка добавления файла координат через окно выбора файлов. В всплывающем меню можно удалить все координаты из блока.
- кнопка добавления файла координат через окно выбора файлов. В всплывающем меню можно удалить все координаты из блока.
 - удалить блок полностью.
- удалить блок полностью.
Под панелью инструментов таблица с данными имеющимися в данном блоке:
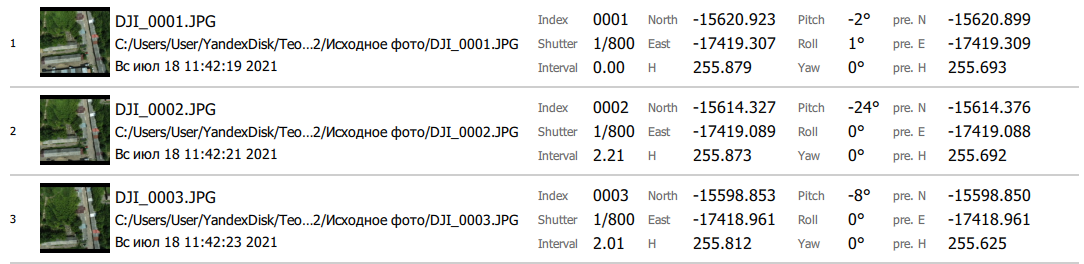
Столбец 1 - Номер по порядку
Столбец 2 - превью фотографии
Столбец 3 - Исходное имя фотографии, адрес на диске и дата создания файла.
Столбец 4 - данные из EXIF (исходное имя, выдержка, интервал фотографирования относительно предыдущей фотографии).
Столбец 5 - Координаты из файла координат ДО смещения координат от фазового центра антенны к центру фотоаппарата.
Столбец 6 - углы наклона коптера в момент фотографирования.
Столбец 7 - координаты фотографий ПОСЛЕ их смещения от фазового центра антенны к центру фотоаппарата.
Настройки экспорта:
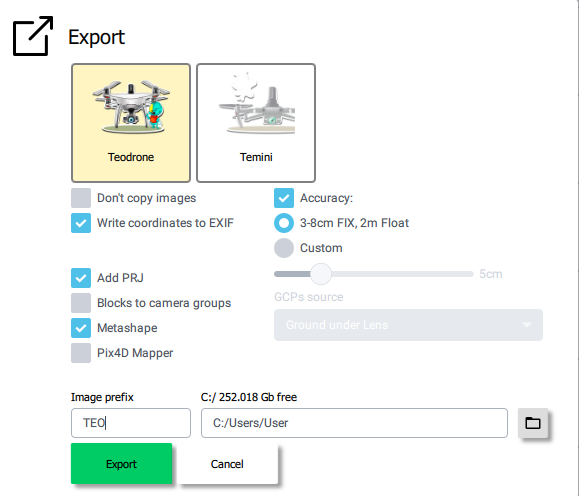
В самом верху необходимо выбрать модель коптера, которым выполнялась съемка, для корректного определения смещения фотографий от фазового центра к центру камеры.
Don`t copy images - не копировать фотографии, если требуется лишь изменить ошибку в координатах, и нет необходимости заново делать копию фотографий.
Write coordinates to EXIF - запись новых координат в EXIF. Так как Teobox создает готовый проект для Metashape и pix4D - необходимость записи данных
Add PRJ - добавить в проект проекцию из Telegram-бота или ту, которую загрузили вручную в настройках.
Blocks to camera groups - эта функция разделяет фотографии на отдельные камеры согласно блокам. Таким образом специально для БПЛА Temini, который не имеет механического затвора создается отдельная камера для каждого вылета (блока).
Metashape и Pix4D Mapper - активный маркер включает создание проекта согласно имеющимся данным в теобоксе для соответствующих программ. Сразу создается проект, куда добавляются фотографии с точными координатами, настраивается проекция. Координаты фотографий отмеченные опознаками добавляются в опознаки. Координата базовой станции добавляется как опознак.
Accuracy (точность): - это указание точность координат.
3-8cm FIX, 2m Float - умное распределение точность от 3 до 8 сантиметров в зависимости от анализа точности координат ботом. Для тех координат, у которых было плавающее решение, будет указана точность 2 м. Там где нет решения - 10м.
Custom - указание любой точности по своему усмотрению.
GCPs source - Для фотографий которые помечены как опознак выбирается какую высоту указать в опознаке - высоту фазового центра антены (Ant Phase center) или высоту земли под центром камеры (Ground under Lens)
Image prefix - Начало имени фотографии, которое можно задать вручную, например название объекта (рекомендуем короткое и на английском языке).
Рядом отображается путь сохранения проекта и доступное пространство на диске.
Свойства ПО TEOBOX
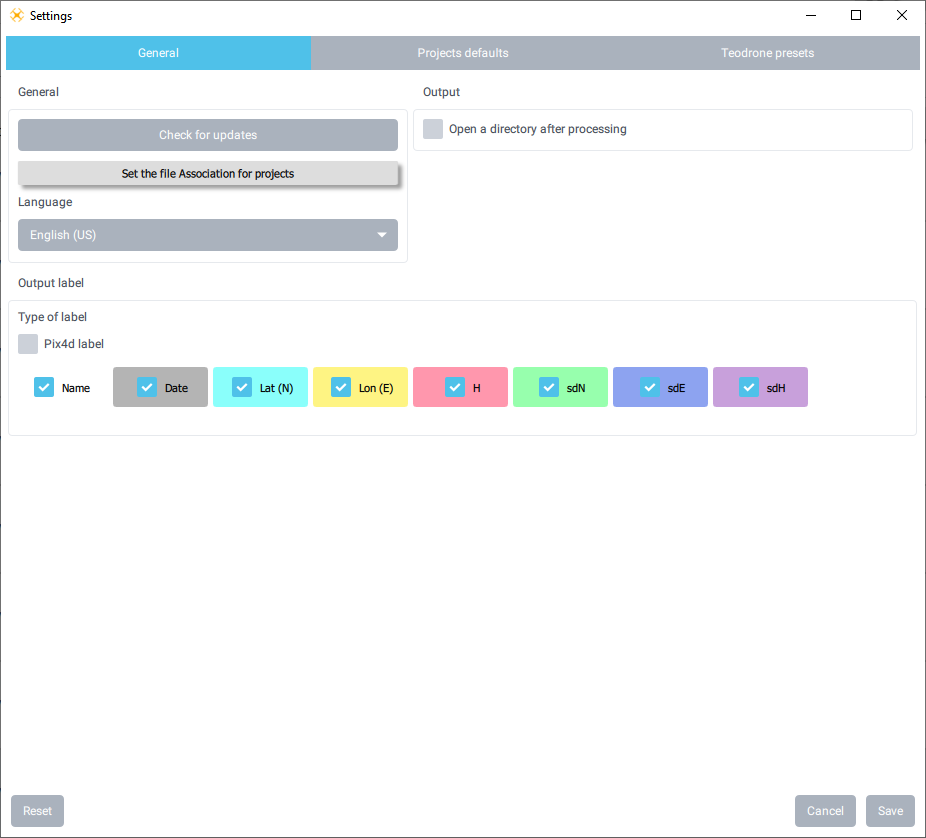
Закладка General
Check for updates - Проверить на наличие обновлений
Set the file association for projects - настроить ассоциацию файлов для ПО TEOBOX, для того чтоб файлы проектов автоматически открывались в программе.
Language - выбрать язык Английский или Русский
Output Label - настройка количества и порядка для создаваемого TXT файла с координатами снимков.
Pix4D label - для программы Pix4D Mapper требуется файл только со столбцом имени и трех координат, эта галочка оставляет только эти 4 столбца.
Open a directory after processing - после завершения обработки открывать папку с файлами.
Закладка Projects Defaults

Project name - Имя проекта
Output directory - папка куда будет сохранен проект
Split photos into folders by blocks - разделение фотографий на блоки по папкам.
Delimiter in the output file - разделение столбцов в выходном файле (по умолчанию TAB)
Use absolute paths - использовать абсолютные пути
Revers images names - по умолчанию имя снимка состоит из Префикс_номер блока_номер снимка. Но можно сначала отобразить номер снимка.
Закладка Teodrone presets
В данной закладке имеется только 2 кнопки с пресетами - для Teodrone (phantom 4) и для Temini (Mavic 2 pro).
Выбирая нужный коптер, тем самым указывается смещение антенны относительно центра камеры.
9) подборка видео уроков
TEODRONE. Litchi. Строим простые миссии.
Настройка Litchi для полетов АФС Теодрон (Teodrone)
Планирование маршрута АФС в QGroundControl с загрузкой в полетное приложение Litchi
Полеты в Litchi для начинающих
Пример обработки данных с БПЛА Teodrone. Videos about TEODRONE data processing
Teobox 1.8
Оглавление:
1) Планирование маршрута https://wiki.teofly.com/books/planirovanie-marshruta/page/planirovanie-missiy
a. Для чего учитывать рельеф при планировании https://wiki.teofly.com/books/planirovanie-marshruta/page/dlya-chego-nuzhno-uchityvat-relef
b. Советы по АФС https://wiki.teofly.com/books/planirovanie-marshruta/page/sovety-po-aerofotosemke
c. Рекомендации при планировании работ https://wiki.teofly.com/books/planirovanie-marshruta/page/rekomendatsii-pogody-dlya-bezopasnogo-poleta
d. Обновление FW плате AGNSS - https://wiki.teofly.com/books/instruktsiya-po-ekspluatatsii-gnss-kvadrokoptera-teodron/page/obnovlenie-fw-plate-agnss
2) Подготовка базовой станции - https://wiki.teofly.com/books/instruktsiya-po-ekspluatatsii-gnss-kvadrokoptera-teodron/page/podgotovka-bazovoy-stantsii
a. Использование БС для Обеспечения АФС https://wiki.teofly.com/books/polevye-raboty-i-kontrol-afs/page/ispolzovanie-bazovoy-stantsii-dlya-obespecheniya-aerofotosemochnykh-rabot
3) Подготовка к полету - https://wiki.teofly.com/books/instruktsiya-po-ekspluatatsii-gnss-kvadrokoptera-teodron/page/podgotovka-k-poletu
a. Маркировка и раскладка опознаков - https://wiki.teofly.com/books/polevye-raboty-i-kontrol-afs/page/markirovka-i-rasstanovka-opoznakov
b. Полевое дешифрирование https://wiki.teofly.com/books/polevye-raboty-i-kontrol-afs/page/polevoe-deshifrirovanie
4) Выполнение съемки - https://wiki.teofly.com/books/instruktsiya-po-ekspluatatsii-gnss-kvadrokoptera-teodron/page/vypolnenie-semki
5) Скачивание данных с платы AGNSS https://wiki.teofly.com/books/instruktsiya-po-ekspluatatsii-gnss-kvadrokoptera-teodron/page/skachivanie-dannykh-s-platy-agnss-l2
6) Метки не равны фоткам https://wiki.teofly.com/books/instruktsiya-po-ekspluatatsii-gnss-kvadrokoptera-teodron/chapter/metki-ne-ravny-fotkam
7) Видеоуроки https://wiki.teofly.com/books/instruktsiya-po-ekspluatatsii-gnss-kvadrokoptera-teodron/page/video-uroki
8) Обработка в t.me/Teoboxbot (недописана статья)- https://wiki.teofly.com/books/telegram-boty-teoteam/page/at-teoboxbot
7) a) Подготовка RINEX для обработка в стороннем ПО (TBC, Manget, Credo и пр)
Некоторые программы не способны обрабатывать RINEX, полученный на GNSS платы с чипом U-blox, из-за того, что эти данные не синхронизированы на ровную секунду.
Ниже пример данных из файла OBS (Rinex файл из UBX)
Первая строка в этом примере - дата и время получения данных.
2021 год
9 месяц
2 день
12 часов
3 минуты
28.398 секунд
Следующая запись идет ровно с интервалом 0.2 секунды, но сохраняется десятичная часть секунды.
> 2021 9 2 12 3 28.3980000 0 20
G 1 21703139.208 1 114050765.449 2 -2803.769 41.000 21703133.996 1 88870704.703 2 -2185.153 38.000
G 3 21795625.130 1 114536782.680 3 2037.324 39.000
G10 24477371.991 1 128629456.632 3 -4582.259 37.000
G17 23538071.600 1 123693399.990 3 -2432.863 37.000
G19 22646171.158 1 119006432.112 3 -928.484 37.000
G12 21636459.978 1 113700363.328 2 -518.698 40.000
R 2 22368812.249 4 119364267.235 2 3588.774 38.000 22368808.345 4 92838858.114 3 2791.340 37.000
R18 21299227.695 4 113696723.333 4 1676.689 35.000 21299223.888 4 88430769.110 2 1304.397 42.000
R10 19377544.750 4 103293217.688 2 662.515 40.000
R 9 20520831.281 4 109580093.181 2 -3299.247 39.000 20520829.083 4 85228951.902 1 -2565.983 43.000
R 1 18707740.013 4 100003591.703 2 135.807 41.000 18707736.217 4 77780554.217 3 105.691 38.000
R 8 19858870.095 4 106343347.385 2 -3511.395 40.000 19858862.629 4 82711460.710 2 -2730.844 40.000
G21 23475215.958 1 123363091.475 3 -3305.807 37.000
G22 21139911.199 1 111090981.831 2 399.015 42.000
G25 21639527.928 1 113716486.171 3 1397.697 38.000
G31 21474096.047 1 112847135.624 2 2409.976 41.000
G32 20494024.631 1 107696825.575 1 -2308.730 43.000
R17 20594942.378 4 110207696.658 2 -2257.642 38.000
R11 22192161.691 4 118588182.506 2 3858.510 40.000 22192138.050 4 92235154.898 3 3000.901 38.000
R24 23030283.382 4 95785880.142 3 -3870.281 37.000
> 2021 9 2 12 3 28.5980000 0 20
G 1 21703245.892 1 114051326.240 2 -2804.284 41.000 21703240.713 1 88871141.677 2 -2184.947 38.000
G 3 21795547.606 1 114536375.309 3 2036.530 39.000
G10 24477546.317 1 128630373.003 3 -4581.780 37.000
G17 23538164.174 1 123693886.479 3 -2432.716 37.000
G19 22646206.495 1 119006617.986 3 -929.808 37.000
G12 21636479.726 1 113700467.188 2 -519.885 40.000
R 2 22368677.729 4 119363549.515 2 3588.458 38.000 22368673.874 4 92838299.899 3 2790.869 37.000
R18 21299164.825 4 113696388.036 4 1676.114 35.000 21299161.106 4 88430508.340 2 1303.578 41.000
R10 19377519.883 4 103293085.245 2 661.917 40.000
R 9 20520954.878 4 109580753.037 2 -3299.499 39.000 20520952.617 4 85229465.135 1 -2566.304 43.000
R 1 18707734.939 4 100003564.586 2 135.342 41.000 18707731.143 4 77780533.114 3 105.118 38.000
R 8 19859001.244 4 106344049.705 2 -3511.672 40.000 19858993.820 4 82712006.983 2 -2731.639 40.000
G21 23475341.658 1 123363752.643 3 -3306.321 37.000
G22 21139896.020 1 111090902.081 2 398.345 42.000
G25 21639474.727 1 113716206.733 3 1397.224 38.000
G31 21474004.337 1 112846653.621 2 2409.758 41.000
G32 20494112.496 1 107697287.424 2 -2309.485 43.000
R17 20595026.754 4 110208148.204 2 -2257.923 38.000
R11 22192017.286 4 118587410.843 2 3857.944 40.000 22191993.513 4 92234554.711 3 3000.534 38.000
R24 23030469.434 4 95786654.200 3 -3870.535 37.000
Момент записи в RINEX файле базы будет на другую миллисекунду и с другой дробной частью.
Некоторые программные комплексы, такие как TBC настроены под оборудование собственного производства, которое перед началом записи данных выполняет синхронизацию и запись ведется начиная с 1.000000, т.е. и база и ровер пишут данные на один и тот же момент времени, 1.0, 1.2, 1.4 и т.д.
Для обработки Rinex файлов в таком ПО требуется выполнять интерполяцию данных базы и ровера.
Для пользователей TEODRONE на прошивках платы AGNSS 0.8.23 и позже - мы разработали специальный конвертер - True rinex converter (cкачать конвертер - https://t.me/teodrone/384)
После добавления нужного файла (или нескольких файлов), необходимо нажать кнопку CONVERT, после чего RINEX файл появится рядом с исходным UBX файлом.
Так же появится кнопка открытия файла в RTKPLOT - ![]() , для анализа качества GNSS данных (смори пост https://wiki.teofly.com/books/teodrone-instruktsiya-po-ekspluatatsii-gnss-kvadrokoptera-teodron/page/5a-proverka-kachestva-gnss-dannykh-v-rtkplot)
, для анализа качества GNSS данных (смори пост https://wiki.teofly.com/books/teodrone-instruktsiya-po-ekspluatatsii-gnss-kvadrokoptera-teodron/page/5a-proverka-kachestva-gnss-dannykh-v-rtkplot)
В случае если у вас была старая прошивка, ее обязательно необходимо обновить (смотри страницу о обновлению платы AGNSS - https://wiki.teofly.com/books/teodrone-instruktsiya-po-ekspluatatsii-gnss-kvadrokoptera-teodron/page/1-d-obnovlenie-fw-plate-agnss), а конвертация файла невозможно. В случае крайней необходимости можно обратиться с просьбой в чате t.me/teosecret с просьбой выполнить конвертацию файла.
использование данной ссылки по назначению многократно повысит шансы на конвертацию файла)))
Donate me:
https://yoomoney.ru/to/410015184390283