Temini - инструкция по обработке в Metashape
Эксплуатация Temini сложнее из-за отсутствия мех. затвора. Будьте внимательны на всех этапах работ.
- Настройка проекта и выравнивание снимков
- Плавное выделение и оптимизация
- Тип затвора камеры
- Последовательность обработки данных с Mavic 2 Pro PPK «Temini»(Последние обновление)
Настройка проекта и выравнивание снимков
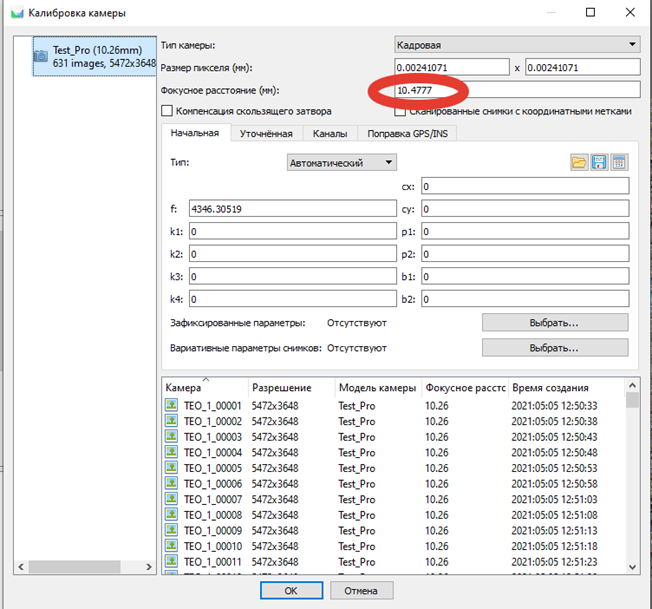
Алгоритм обработки стандартный за некоторым исключением: после загрузки фотографий и данных привязки (точных ЦФ и маркеров), заходим в «Инструменты» - «Калибровка камеры» в строке «Фокусное расстояние» вводим значение 10.4777, при этом фиксировать эту величину в «Зафиксированные параметры» не надо.
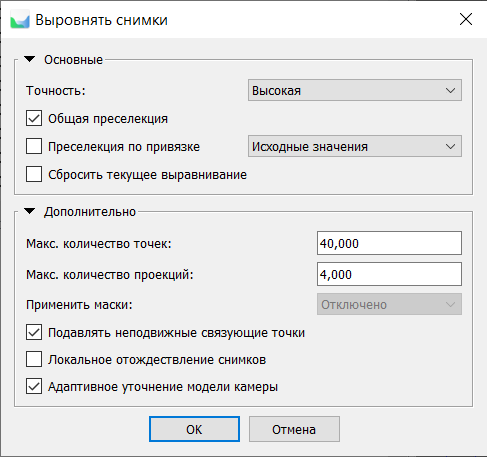
Далее выполняем процедуру выравнивания: «Обработка» - «выровнять снимки» в «Дополнительно» ставим галку в «Адаптивное уточнение модели камеры»
Плавное выделение и оптимизация
- фильтруем ошибочные связующие точки через «Модель» - «Плавное выделение» выбирая параметр «Ошибка репроецирования» устанавливаем величину 0.5 единиц.

- В «Правка» - «Удалить выделенное», либо просто del (в случае если так же был выбраны опознак, то программа выдаст запрос удалить его или нет – жмём нет),
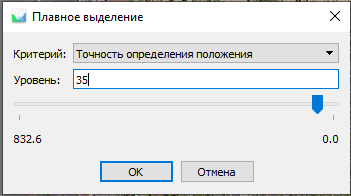
- Затем повторяем плавное выделение, но уже по параметру «Точность определения положения» устанавливаем величину 35 единиц и также удаляем выделенное.
- Расставляем маркера на всех снимках и выполняем оптимизацию выравнивания, при этом для оптимизации переводим в разряд опорного тот из контрольных маркеров (если у вас их несколько), на котором ошибка по высоте наиболее близка к средней ошибке по высоте всех контрольных маркеров (желательно с наибольшим или средним количеством проекций)
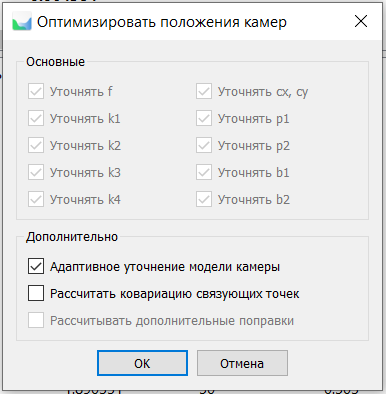
- Выполняем оптимизацию. Ставим галочку в «Адаптивное уточнение модели камеры»

Дальнейшая обработка (https://youtu.be/-0P-37Ia2yg) не отличается от стандартного алгоритма обработки данных с Phantom 4Pro (Teodrone).
Второй вариант оптимизации выравнивания камер по обработке данных с Temini.
При использовании этого метода распределение фактических величин ошибок на контрольных маркерах имеют более ровный характер в сравнении с методом оптимизации по одному опорному маркеру.
После расстановки маркеров на всех фотографиях необходимо выполнить уточнение величины фокусного расстояния камеры, для этого сохраняем проект, делаем копию рабочего блока, в зависимости от общего количества маркеров, выбираем в качестве опорных 1-3 маркера, выполняем оптимизацию выравнивания с адаптивным уточнением модели камеры. Сохраняем уточнённые данные калибровки камеры в файл формата *.ini для этого заходим в «Инструмент»-«Калибровка камеры»-«Уточнённая» - «Сохранить (жмём на изображение дискетки)». Открываем «Блокнотом» сохраненный файл *.ini и копируем уточнённую величину фокусного расстояния (значение напротив параметра «F»). Удаляем старую и делаем новую копию исходного блока. В сохранённой копии блока заходим в «Инструмент»-«Калибровка камеры»-«Начальная» и вставляем уточнённую величину фокусного расстояния в окошко напротив надписи «Фокусное расстояние (мм):». Фиксируем величину фокусного расстояния, для этого заходим в пункт «Выбрать» и ставим галочку напротив параметра «f». Производим оптимизацию выравнивания с адаптивным уточнением модели камеры вообще без использования маркеров в качестве опорных т.е. все маркера в статусе контрольных (без установленных галочек). Таким образом оптимизация выполняется только по точным центрам фотографирования и уточненному значению фокусного расстояния. В случае, когда в блоке используются фотографии из нескольких вылетов, после загрузки всех данных в проект, фотографии необходимо разбить на отдельные группы: «Инструмент»-«Калибровка камеры» - через клавишу "Shift" выделяем группу фотографий первого вылета- правая клавиша мыши - "создать группу", и так создаём группу для каждого вылета дрона. Уточняем фокусное расстояния камеры в каждой группе фотографий. (последовательность рассмотрена выше), при этом фиксировать в качестве опорного нужно тот маркер (или маркера, в случае их достаточного количества), который относится к соответствующей группе фотографий. При небольшом количестве маркеров в проекте, для уточнения фокусного расстояния в каждой группе используйте в качестве опорных все маркера.
Тип затвора камеры
Тип затвора камеры, используемой для получения изображений, может повлиять на результаты, полученные с помощью программного обеспечения для фотограмметрии. Например, изображения, снятые камерами со скользящим затвором, содержат вертикальное смещение, когда есть относительное движение между камерами и объектами во время получения изображения.
Глобальный и электронный затвор
Многие цифровые зеркальные фотоаппараты, бытовые камеры дронов и телефонные камеры используют скользящий затвор, чтобы снимать видео лучшего качества и уменьшить размытость движения. Основные игроки на рынке дронов, например, дроны DJI и камеры GoPro, имеют встроенный рольставни. Простота использования и разумная цена этих дронов и камер позволяют все большему количеству людей использовать их для картографических работ.
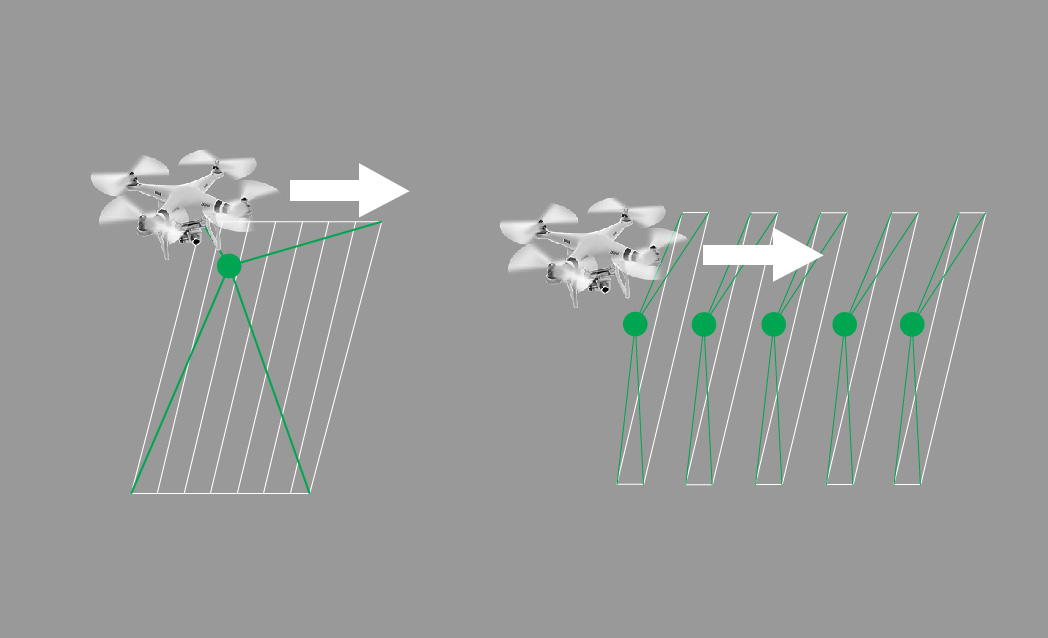
На этой анимации показано, как работают жалюзи двух основных типов. Камеры с глобальным затвором (слева) записывают весь кадр изображения почти в одно и то же время. Это обычно наблюдается в камерах с датчиком CCD. Камеры со скользящим затвором (справа) записывают каждое изображение построчно, сверху вниз. Этот тип затвора сейчас занимает большую часть рынка фотоаппаратов.
Эффект скользящего затвора
Эффект скользящего затвора возникает, когда отношение камера-объект уже изменилось во время построчного считывания того же изображения. При использовании этих искаженных изображений в программном обеспечении фотограмметрии смещение пикселей может вызвать проблемы с сопоставлением характеристик и, следовательно, неточные параметры камеры. Неточно рассчитанные параметры камеры, безусловно, приведут к низкому качеству картографирования. Здесь мы уделяем особое внимание потребительским камерам для дронов и экшн-камерам, поскольку в большинстве цифровых зеркальных камер реализован механический затвор, который позволяет пользователям устанавливать короткое время экспозиции. В этом случае эффект будет настолько незначительным, что им можно будет пренебречь.
Большинство программных процессов для фотограмметрии основаны на предположении, что при считывании одного изображения существует только одна позиция камеры. Модель коррекции скользящего затвора должно учитывать перемещение положения камеры.

Последовательность обработки данных с Mavic 2 Pro PPK «Temini»(Последние обновление)
Последовательность обработки данных с Mavic 2 Pro PPK «Temini»
- Выравнивание снимков с адаптивным уточнением модели камеры. Снимки разделены по группам (вылетам) в калибровке. Фокусное в каждой группе зафиксировано
- Фильтрация ошибочных связующих точек через плавное выделение по ошибкам репроецирования и точности определения положения
- Расставляем маркера на всех фотографиях (все маркера контрольные)
- Копируем блок с расстановкой маркеров, корректируем в нём фокусное расстояние для каждой группы камер
- Вариант корректировки через оптимизацию с опорными маркерами и последующим ручным подбором окончательных значений фокусного
- Вариант корректировки сразу с ручным подбором окончательных значений фокусного (нужен определённый опыт)
- Дважды копируем блок с расстановкой маркеров, в каждый скопированный блок, в каждую группу камер вводим окончательно уточнённое фокусное расстояние. В первой копии оптимизируем с адаптивным уточнением модели камеры, во второй – с определением доп. поправок. Анализируем точность по маркерам.
При необходимости, ещё раз корректируем фокусное и повторяем пункт 5.
- Если добились требуемой точности по маркерам, выбираем тот блок, в которым будем продолжать работу (т.е. или блок с адаптивным уточнением или с доп. поправками) и выполняем дальнейшие построения (плотное облако, ЦММ, и пр.)